Nastavení 
21.2.2021
Model v přímém letu stále klesal a když jsem ho držel na kniplu tak, aby letěl v horizontu, odečetl jsem na displeji rádia během letu údaj pitch - úhel podélného sklonu 2.5 stupně.
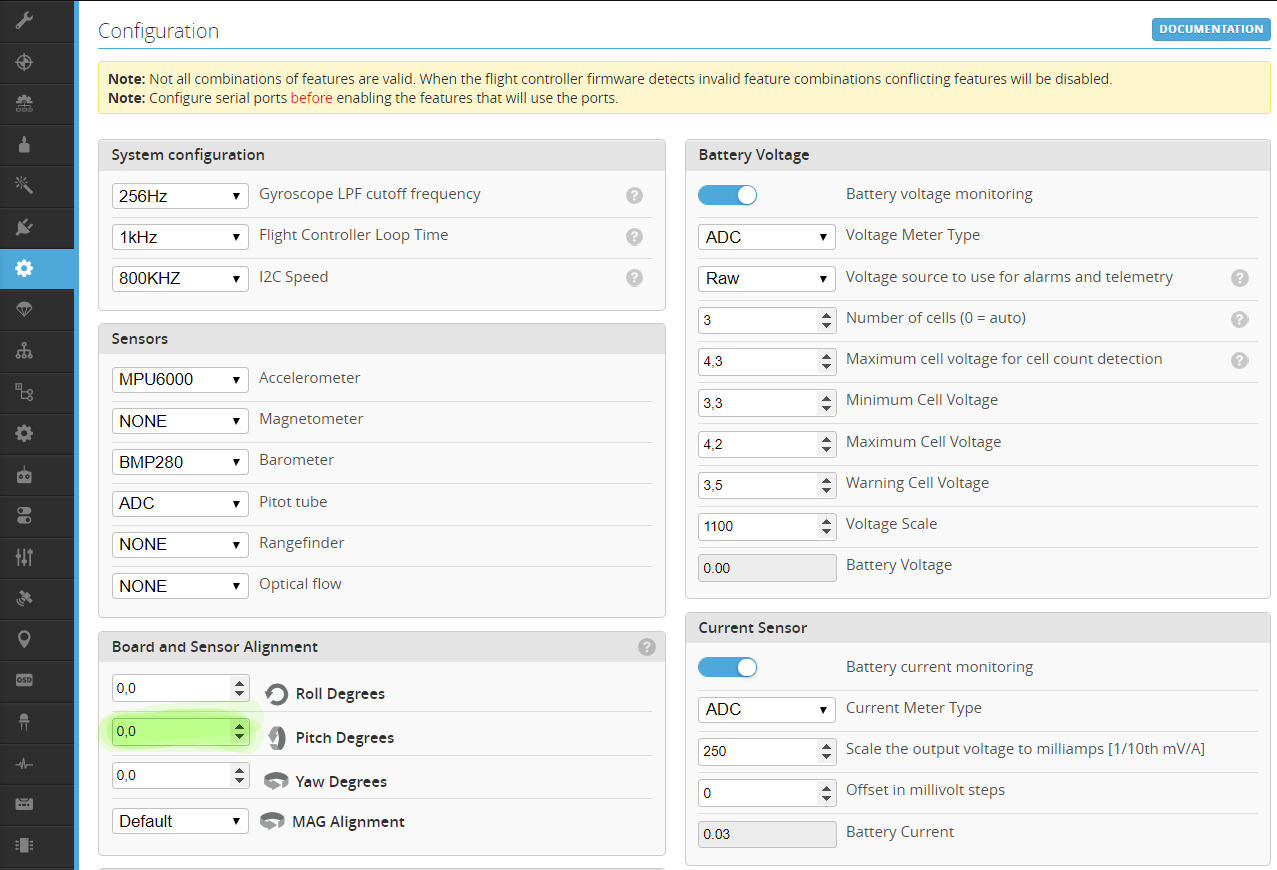
Příslušný parametr jsem nastavil doma.

Model v přímém letu stále klesal a když jsem ho držel na kniplu tak, aby letěl v horizontu, odečetl jsem na displeji rádia během letu údaj pitch - úhel podélného sklonu 2.5 stupně.
Příslušný parametr jsem nastavil doma.
Další fází mých pokusů je instalace modulu GPS. To mi umožní vyzkoušet navigační mody a hlavně mod RTH - Return To Home, model by se měl sám vrátit k místu vzletu.
To je vlastně to hlavní, kvůli čemu s flight controllerem blbnu. Chci, když při FPV letu ztratím obraz v brýlích, aby se model vrátil ke mě.
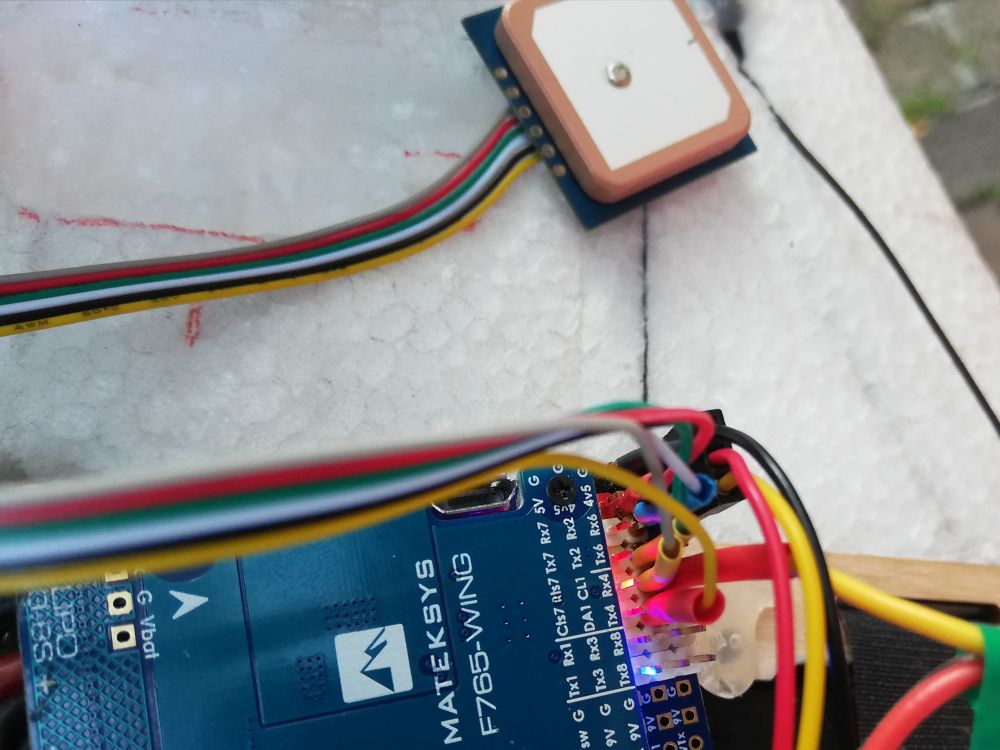
Připojuji GPS. Jsou to další kablíky, ale zapojení je jasné, mám to za chvilku hotové.
Nastavení GPS je také jednoduché.
Jen se to blbě testuje,
v našem kamenocihelném domě se zdmi 50 a více cm tlustými to otestovat nejde, musím na dvorek! 
Propojení GPS s flight controllerem [FC]:
Zároveň také vracím na letadlo kameru DJI FPV a nastavuji OSD, zobrazení telemetrie v brýlích. Při pokusech na dvorku zjišťuji, že ukazatel směru se točí na jinou stranu, točím letadlo doprava, šipka se točí doleva. použil jsem nastavení vyčtené z internetu
Propojení DJI FPV air unit s flight controllerem [FC]:
Navigační mody, které jsem si mimo RTH nastavil:
V tomto modu udržuje letadlo výšku a dělá to docela přesně. Je to docela příjemný mod, letadlo drží výšku i v zatáčce, člověk se může věnovat obrazu v brýlích. Nesmí se ale zapomenout udržovat rychlost letu, občas je třeba v zatáčce přidat plyn. Nemám rychloměr, vidím ale v brýlích odběr v Ampérech, po první hodině létání mám v oku, kolik Ampér potřebuje letadlo v "cestovním" režimu při letu v horizontu, kolik v zatáčce, kolik při stoupání.
Letadlo krouží ve výšce a v místě, kde přepnu na tento mod. Velikost kruhů je nastavena v setupu kontroléru. Funguje to i za silného větru.
Ostatními mody se zatím nezabývám.
zpátky na: První lety │ dál: Testovací lety
přehled kapitol:
(zveřejněno v rubrice Moje záliby, co dělám, ... | S čím létám | Razor)