
Restart 
Razor po tom, co mi posloužil k pokusům s flight controllerem, leží doma na polici. Řekl jsem si, že ho zase provětrám.
Vytáhl jsem ze šuplíku FrSky přijímač na 2.4G - přijímač na 900MHz je teď v Twin Starovi, serva, regulátor i motor v letadle zůstaly, tak jenom rádio nastavit a můžu to jít zkusit. Když to mám v ruce, vyřízl jsem z náběžky záseky po větvích, jeden byl hluboký čtyři centimetry. Vyříznuté místo jsem vyplnil klínky ze zbytků EPP a když to zaschlo, do tvaru náběžky jsem to obrobil ostrým nožem a brousítkem. Není teď vůbec vidět, že tam nějaké záseky byly. Nastavení vysílače mám za chvilku, musím jen nastavit mixy na elevony, které jsem předtím kvůli instalaci flight controlleru v nastavení modelu rušil.
S nabitou baterkou jdu za humna zkusit to v letu. Mám mindrák z toho, že se mi při předchozím létání nedařilo Razora hodit do vzduchu. Každý druhý pokus o start končil na zemi. Razor se startuje hodem za konec křídla, buď jsem to mrsknul moc silou a Razor se pár metrů ode mne otočil na záda, nebo jsem hodil málo a Razor kecnul na zem kus ode mne. Starty byly pro mě dost adrenalin. Tentokrát jsem se nadechnul, šoupnul jsem Razora do vzduchu a on letěl od mé ruky jak po kolejích.
Když jsem trochu víc přidal, Razor šel obloukem nahoru. Sáhnul jsem na trim výškovky a potlačil. Nepomohlo to. Napotřetí jsem tlačítko trimu výškovky podržel, abych s trimem dojel dál, letadlo ale přestalo být řiditelné. Plácalo se ve vzduchu jak motýl, nedokázal jsem ho udržet ve vzduchu, jen jsem bojoval o to, abych nepadl do lesa nebo aleje. Rozkývané letadlo padlo na zem a já nechápal, co se děje. Pak mi to ale, když jsem koukal na přizdvižené elevony, došlo. Obrácený chod trimu! To je zrada OpenTX, že si to člověk může takhle blbě nastavit. Jsem těm mixům věnoval jen pět minut.
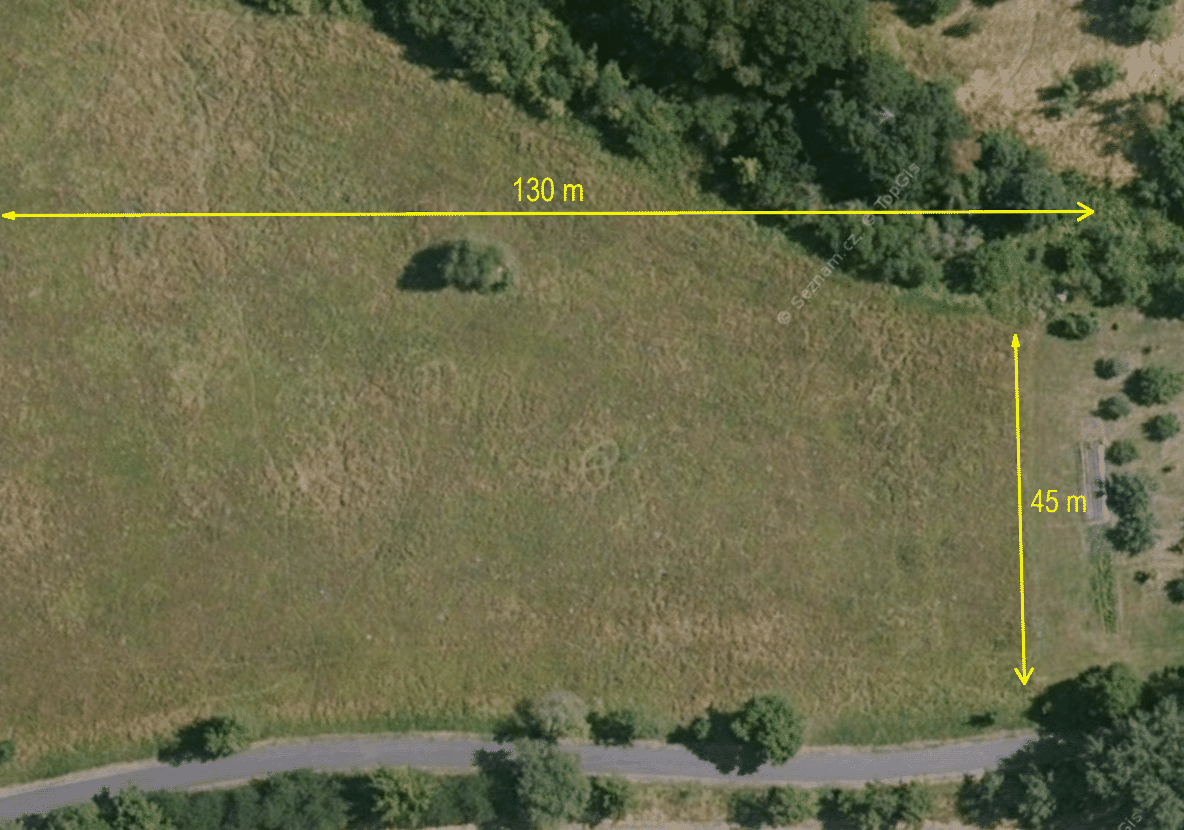
I druhý odhod se mi povedl, výškovku jsem si vytrimoval a tak jsem sestoupil o patro níž pod úroveň stromů okolo.
Za zády alej s velkými starými hruškami, před sebou les stoupající po úbočí kopce proti mě,
louka jako malé fotbalové hřiště.
Létám v tom prostoru, zkouším si ostré zatáčky, zatáčky v normální poloze, zatáčky na zádech.
Do příště si musím zmenšit výchylky křidélek, velké výchylky výškovky v těch zatáčkách využiju, křidélka jsou ale moc ostrá.
Pak přidávám plyn a zkouším to samé na vyšší rychlosti.
Utáhnout letadlo při té vyšší rychlosti ve stejném poloměru zatáčky dá víc práce,
hlavně se však všechno děje v kratším čase.
Přímý let už je v tom prostoru jen mžik, stromy okolo se blíží o hodně rychleji.
Na úplně plný plyn tu nedokážu letět. Chvilku létám rychle, co mi strach dovolí,
pak musím zase na chvilku zvolnit.
Dvacet vteřin dokážu lítat v tom omezeném prostoru pod plynem, pak musím ubrat, abych neudělal nějaký kiks.
Budu muset ty nervy více cvičit!  Po pěti minutách končím. Kvůli zimě. Teplota spadla snad o 15 stupňů!
Po pěti minutách končím. Kvůli zimě. Teplota spadla snad o 15 stupňů!
V dalším kole namontuji na letadlo FPV kameru.

