Rozhlédl jsem se doma co najdu v šuplíku a co budu muset koupit.
Motor by měl být velikosti 2206, baterka možná bude stačit Li-Pol 2S 600 mAh
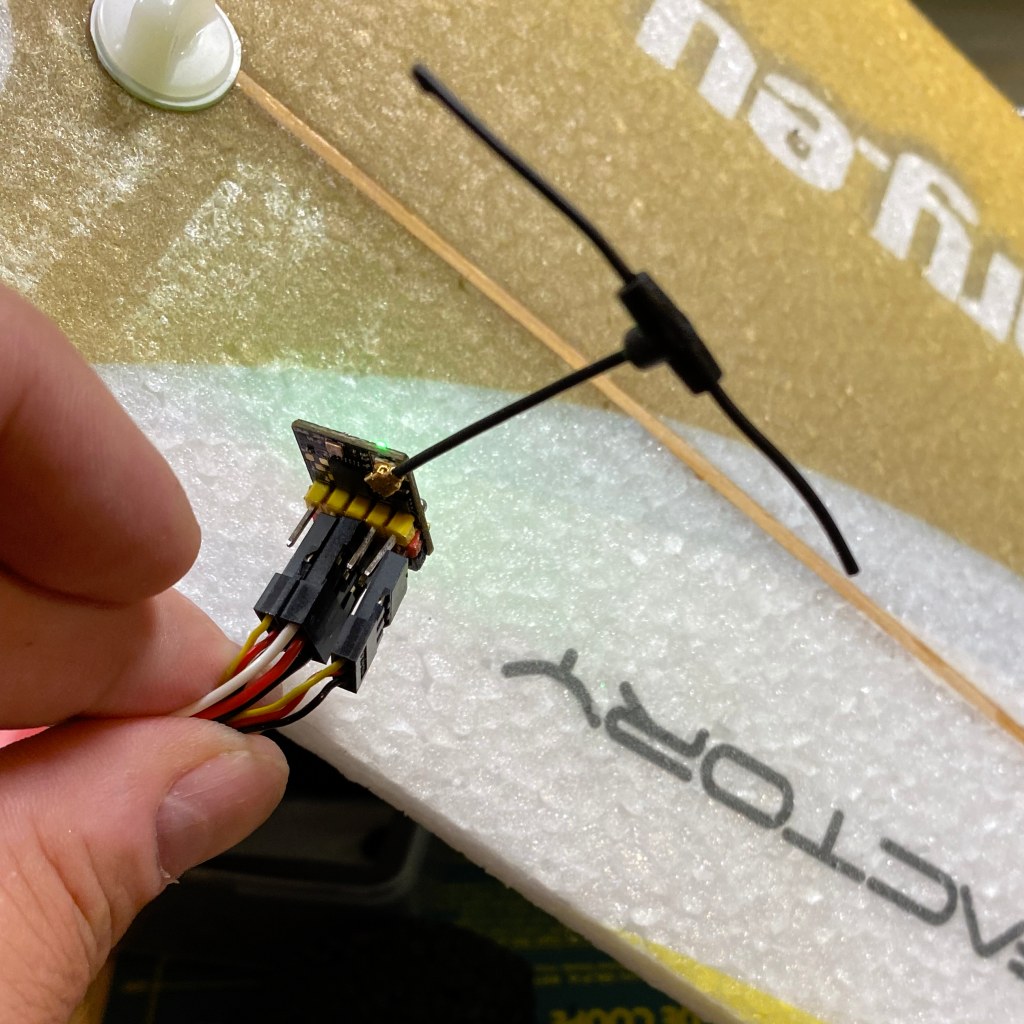
Chtěl bych řídit model vysílačem TX16S a s přijímačem ExpressLRS.
Přijímač se zapne s vypnutým vysílačem. Po minutě přijímač začne rychle mrkat a lze se k němu přihlásit přes wifi.
Kdyby to byl nový přijímač, je heslo l jeho wifi "expresslrs".
Po přihlášení (z PC, telefonu) zadáte adresu 10.0.0.1 a v načtené stránce se dozvíte vše potřebné:
V přijímači je ELRS 3.2.1.
co mám ve vysílači:
Radio Settings - Info - Modules, vidím V3.2.1, obojí je na stejné verzi 3, takže ok.
(Verzování ELRS)
Na stránce zobrazované přijímačem si ještě zkontroluji:
Binding Phrase - měla by to být ta mnou zadávaná fráze - heslo
Enable Model Match vypnutý
WiFi "auto on" interval nastavený na 30 sekund
Potom lze přijímač vypnout, zapnout vysílač a přijímač a zkusit, zda to komunikuje - funguje.
Kdyby nebyla major verze ve vysílači a přijímači stejná (3.x.x jako v tomto případě),
musel bych nahrát do přijímače vyšší firmware, to se dělá programem ExpressLRS Configurator.
Přijímač Happymodel EPW5 2.4GHz PWM receiver chodí na 5. kanále jen dvoustavově.
Servo připojené na tento kanál jezdí jen mezi dvěma polohami,
nefunguje proporcionálně. Já ale potřebuji 5 proporcionálních kanálů!
Výškovka, směrovka, 2x křidélka, motor. Jak to udělat?
Je to jednoduché, taková triviální finta.
Zapnete přijímač ale nezapnete vysílač. Přijímač po minutě začne rychle mrkat a můžete se přihlásit na jeho wifi. Na stránce 10.0.0.1 si najdete mapování kanálů:
Nastavíte na výstup 5 kanál 6. Pak už jen stačí přehodit si v mixech v EdgwTX křidélko na kanál 6 a je to!
Shodou okolností jsem byl nucen u jiného letadla měnit servo v trupu.
Trup z elaporu, servo zalepené nějakým bílým tmelem, možná silikonem.
Vydloubnout servo ven nepříjemná práce.
Trup Pipera je stísněnější a subtilnější, vyvíjet podobné násilí bych nechtěl.
Tak jsem přemýšlel, jak to řešit inteligentněji.
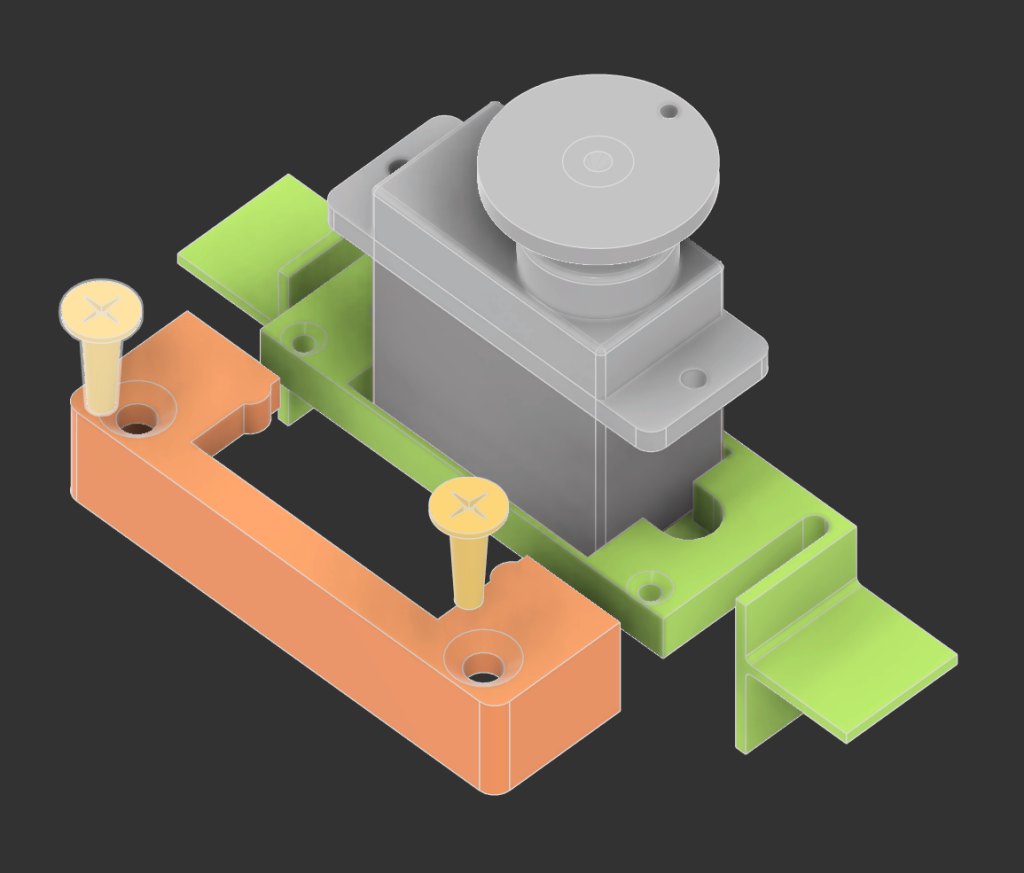
Vymodeloval jsem si ve Autodesk Fusion rámeček,
do kterého by šlo servo svrchu zasunout,
a který by šel zalepit do boku trupu.
Rámeček musí být dostatečně volný,
aby tam servo šlo strčit i šikmo a aby se nemusel moc hmoždit kablík serva.
A tu volnost vymezím přiklopením druhým dílem a zajištěním malými šroubky.






 anglicky
anglicky