


Souřadný systém 
23.12.2024
Původně jsem si myslel, že to je takto:
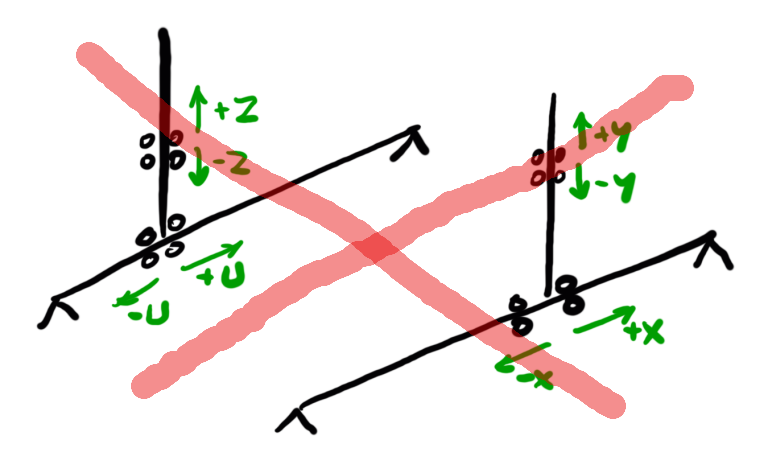
U - je v GRBL označena jako A. na desce RAMPS jako E0.
Původně jsem si myslel, že to je takto:
U - je v GRBL označena jako A. na desce RAMPS jako E0.
Keith se na své stránce rcKeith.co.uk upozorňuje na některé problémy.
Radí třeba použít pro propojení nocových spínačů stíněné kablíky.
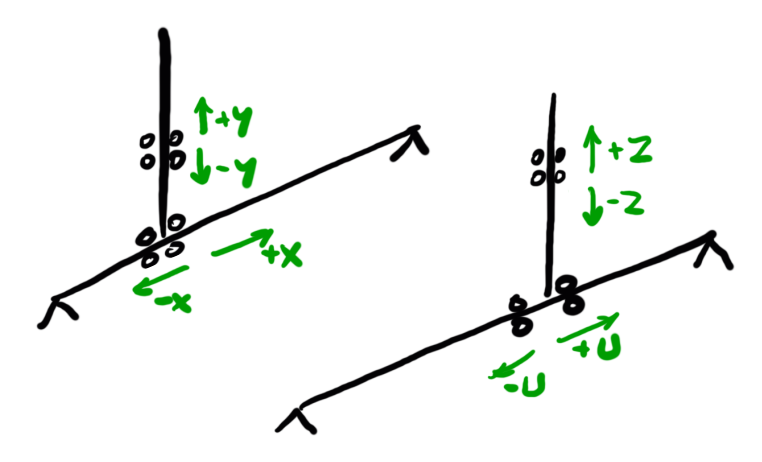
Věnuje se podrobně testování směru pohybu pojezdů. Radí nastavit pojezdy cca do středu. To musí být stroj vypnutý, jinak motory drží polohu. Ruční posouvání pojezdů generuje v motorech napětí, radí posouvat je pomalu, aby jste si neodpráskli obvody řízení. Při testování je třeba se vyvarovat dojetí vozíku k mechanickému dorazu, ničí to pružnou spojku mezi motorem a šroubem. Směr posunu je tedy dobré testovat na malých krocích, zadat třeba posun o 1 mm, potom 10 mm. Při požadovaném pohybu do plusu, např. X+, by se osa měla pohybovat dopředu nebo nahoru. Nahoru mi je jasné, co je dopředu nevím. Z fotek jeho stroje je to tak, jak on má pojezdy na stole, že pro mě je to pohyb doprava. Zapsal jsem si sem: Souřadný systém
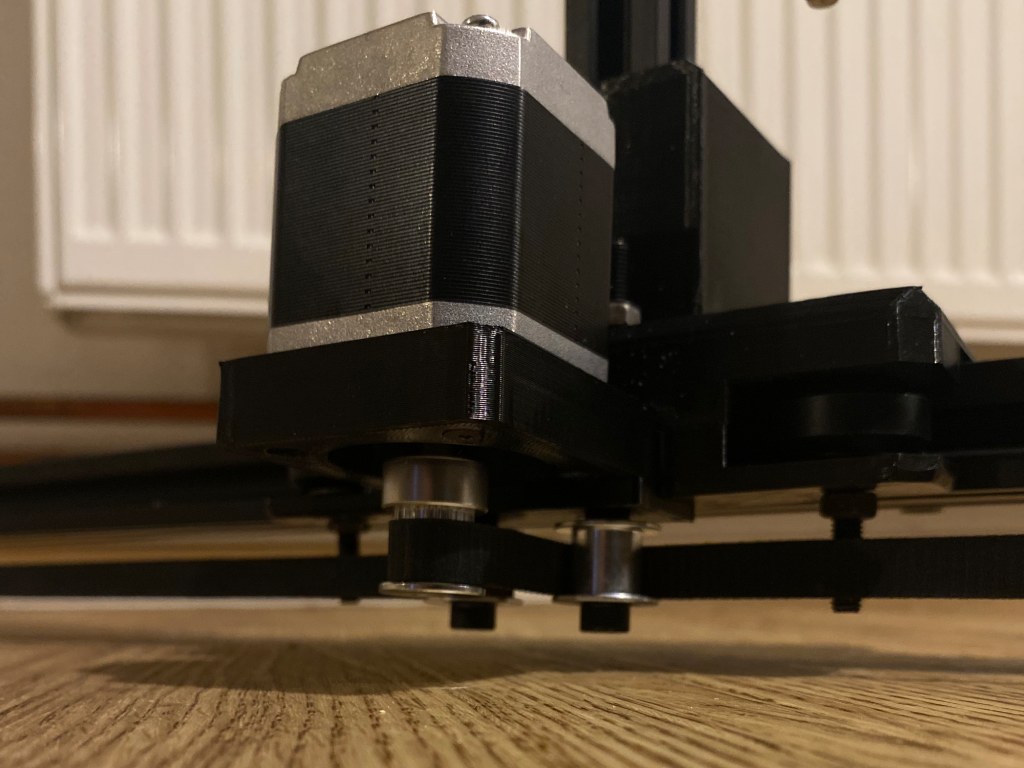
Vytisknul jsem všechny díly pro svislý pojezd.

Po smontování všechno jezdí hladce, jen ta trapézová matice je nějaká nic moc. Mám ještě jednu s vymezením vůlí, v případě nutnost vyměním.
Připojil se motor na vývod Y, spustil program GRBL a zapnul řídící jednotku.
A ono to jezdí! Jen je v programu defaultně nastavené stoupaní matrického závitu a jezdí to místo 10 mm mnohem nohem dál. A taky opačným směrem.
V programu jsem osu reverzoval, narychlo určil konstantu přepočtu stoupání trapézu a už to jezdí správným směrem a na správné vzdálenosti.
Dotisknul jsem všechny díly s zkompletoval oba pojezdy. Došlo taky na zkoušku, zda to jezdí poháněné motory a ovládané z programu.

Jezdí to!
Metr dlouhá konstrukce je asi přiměřené tuhá. Neměřil jsem průhyb horizontálního vedení, když je na něm teď kopletní pojezd. Profil 20 x 40 se trochu kroutí a na horním konci svislého vedení to dělá rozkmit +- 5 mm. Je to samozřejmě ve směru osy řezacího drátu. To by nemělo mít na nic vliv. Pokud bude průhyb horizontálního vedení významný, mohu profil snadno podepřít další nohou. Podepření by pořešilo i ten krut.
Konstanty jsem stanovil takto:
Výpočet konstant se dá najít třeba tady: prusa3d.com
Je to už trochu rozměrné a nevešlo se mi to pořádně na stůl u počítače.
Půlmetrové kablíky k motorům už nestačily a tak jsem motor svislého vedení propojil delší metrovým kablíkem,
který jsem si koupil. Motor ani neškytne a už to nefunguje ani s původním kablíkem.
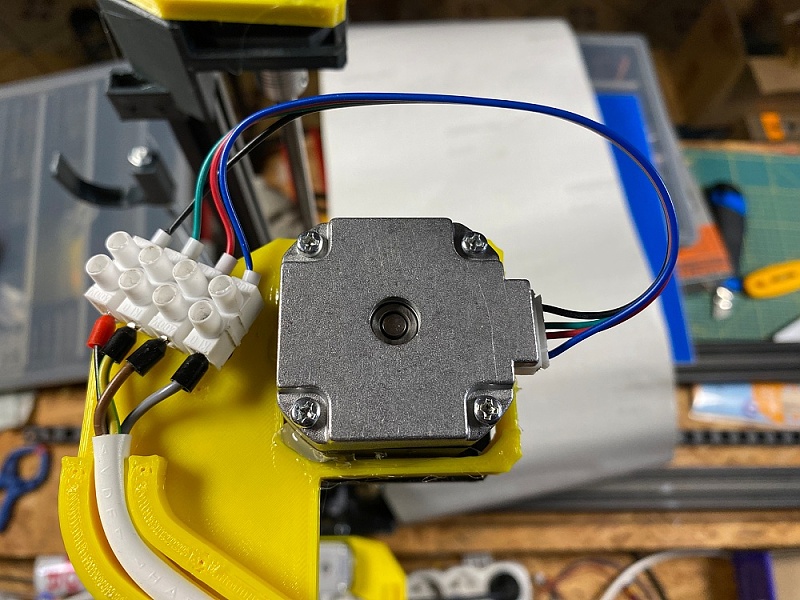
Dodatečně jsem zjistil, že kabely nejsou stejně zapojené! 
Konstrukce a výroba prvního prototypu dopadla dobře. Zatím to tak vypadá. Ale jedno jsem nedomyslel! Předpoklad, že mi budou stačit metrové kabely k motorům, se při rozestavení pojezdů na stole ukázal jako úplně nesmyslný.
Metr vodorovně, půl metru nahoru, půl metru k řídící jednotce, to jsou dva metry kabelu. A k druhé straně stroje metr navíc, to znamená kabel tři metry dlouhý!
Rozhodl jsem se prodloužit kabely k motorům býlým silovým kabelem 4 x 0,75 mm2. Koupil jsem 10 metrů kabelu a čokolády - svorkovnice a pustil jsem se do prodlužování.
Nařezal jsem kabel
Když jsem to začal prakticky realizovat, zjistil jsem, že spolehlivě upevnit oholený kablík ve svorkovnici je prakticky nemožné. Hlavně ten tenký z originál kabelu k motoru. Řešení je jediné - opatřit oholené konce kablíků dutinkami.

Druhý problém je nepoměr tuhosti kablíků k motoru a bílého silového čtyřžilového kabelu. Proto jsem nakreslil prototypové držáky svorkovnic a habelu. Později to předělám.
Kleště i s dutinkami jsem koupil za 350 Kč na Alze. Večer jsem objednal, hodilo by se, abych je ráno našel v Alzaboxu, dorazily ale až za dva dny. Musel jsem tedy s kompletací stroje počkat.

Kleště i krimpování dutinek na kablíky bez problémů
I u prototypu musím nějak pořešit skříň řídící jednotky. Není možné, aby mi Arduino a zdroj "běhaly" po stole.
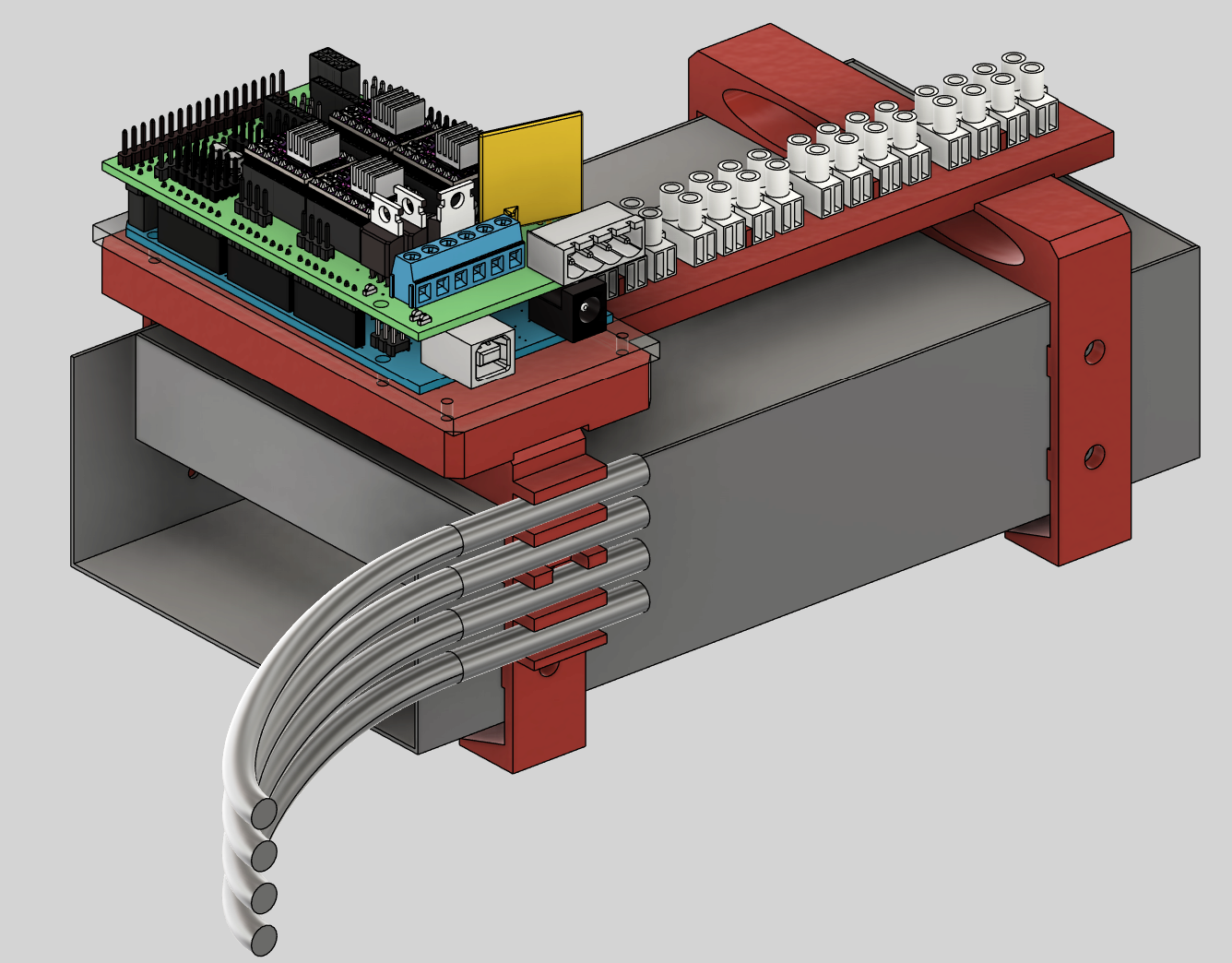
Zatím nebudu řešit nějakou skříňku, kam to schovám. Nakreslil jsem si držáky, které tisknu, slepím je dohromady a nasadím na zdroj. Bude to kompaktní sestava, která bude na konci kabelů od motorů, síťového kabelu a USB kabelu, a jednoduše to zafixuji někde na stole.
Skříňku jako takovou vymyslím později. Síťový kabel i kabely od motorů by měly být přes konektory a na síťovém přívodu by měl být vypínač.
 Sestavení mechaniky Oživení stroje
Sestavení mechaniky Oživení stroje 
přehled kapitol:
(zveřejněno v rubrice Modely letadel | Dílna | CNC řezačka HotWire verze 1)