


Moje využívání systému INAV 
22.10.2022
Abych někoho, kdo čte tyto stránky, neuvedl v omyl, musím popsat, jak já využívám systém INAV.
Abych někoho, kdo čte tyto stránky, neuvedl v omyl, musím popsat, jak já využívám systém INAV.
K pochopení modů INAVu mi pomohlo létání s kopterami a postupné vylepšování dokumentace systému INAV. Nechápal jsem dobře rozdíl mezi mody ACRO a MANUAL. Začínal jsem s INAV v letadle, pak jsem začal s kopterami a systémem Betafligt a při sledování chování koptery v různých modech jsem začal chápat, jak to funguje. Pomohlo i to, že v poslední verzi INAV se objevila indikace modu ACRO - viz obrázek.
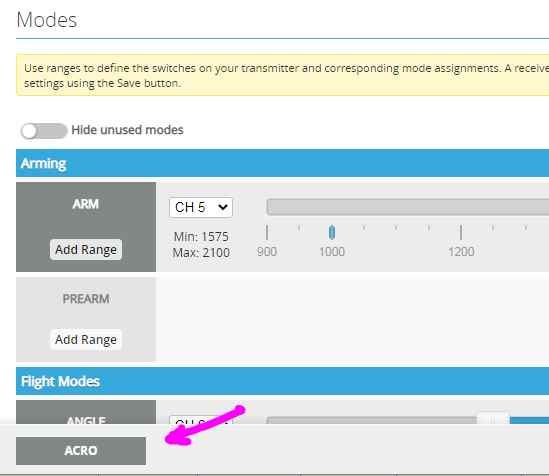
Stroj v tomto módu není stabilizovaný, řízení je plně na pilotovi, pohyby kniplů jsou bez korekce flight controllerem přenášeny na kormidla.
ANGLE je rozšířením módu ACRO. Letadlo letí srovnané, drží křídla v horizontu. Pokud ho poryv vychýlí ze směru, letí v novém směru, nedrží kurs. Při zásahu do řízení křidélky jde letadlo do náklonu, ale jen do maximálně povoleného náklonu. Při zásahu do řízení výškovkou mění letadlo podélný sklon, ale zase jen do maximálně povoleného sklonu.
Navigační módy jsou založeny na módu ANGLE.
Mód HORIZON vychází z módu ANGLE. Náklon ani sklon není omezen, s letadlem lze udělat výkrut, s letadlem lze udělat přemet.
Popis: Automaticky letí na home pozici
Podmínky:
 .
.