


Co potřebuji 
14.4.2026
Co je potřeba k provozování INAV:
- Model osazený na kormidlech servy s alespoň jedním elektromotorem pohánějícím vrtuli a vybavený regulátorem motoru. U více motorů s více regulátory. (dívám se na problematiku jako letecký modelář, ne dronař)
- Vícekanálový vysílač se dvěma kniply a s přepínači, které vám umožní přepínat různé režimy letu. Vysílač nebo vysílačový modul v něm musí být kompatibilní s vaším přijímačem. Hodně se používá ExpressLRS přenosový systém na 2.4 Ghz nebo 900 MHz. Ve vysílači musí být systém, který podporuje přenosový systém. Třeba ten ELRS. Používá se třeba EdgeTX
- Firmware pro vysílačový modul a firmware pro přijímač shodné verze.
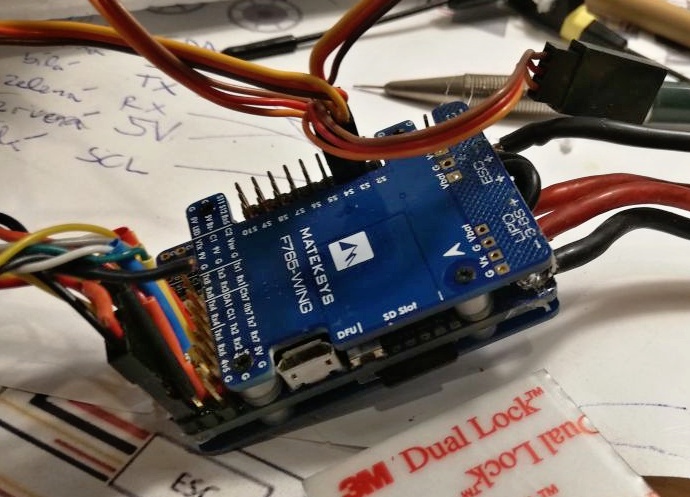
- Nějaký flight controller, který má PWM výstupy pro připojení standardních serv vašeho letadla
- Přijímač, který umí komunikovat po sériové lince s flight controllerem a který je kompatibilní s vysílačovým modulem vačeho vysílače. Přijímač nemusí mít žádný výstup pro serva.
- Firmware pro přijímač (u ELRS se nastavuje v ELRS Configuratoru)
- GPS modul, který umožní samostatný navigační let modelu. To je třeba, pokud potřebujete využít automatický návrat k místu vzletu - RTH. GPS modul nemusí mít kompas, nemusí mít barometr. (viz Test modulů GPS)
- Pohonný akumulátor, který bude napájet pohonný elektromotor i flight controller
- Firmware INAV kompatibilní s vaším flight controllerem
- Počítač s Windows a wifi, na kterém budete provozovat program pro nastavování flight controlleru
- Program do počítače INAV Configurator verze odpovídající verzi INAV ve flight controlleru
- Někdy schopnost pájet, ne všechny flight controllery jsou dodané v sestavené podobě. Podívej se třeba zde: Ukázka práce s pájecím perem
- dokumentaci k flight controlleru, wiring diagram
- dokumentaci k INAV: github.com/iNavFlight/wiki

