
Nastavení Betaflight 
Natavení Betaflightu mi připadá jednodušší než nastavení INAV. Vodítkem může být článek oscarliang.com/betaflight-firmware-setup
Tady česky: rotorama.cz
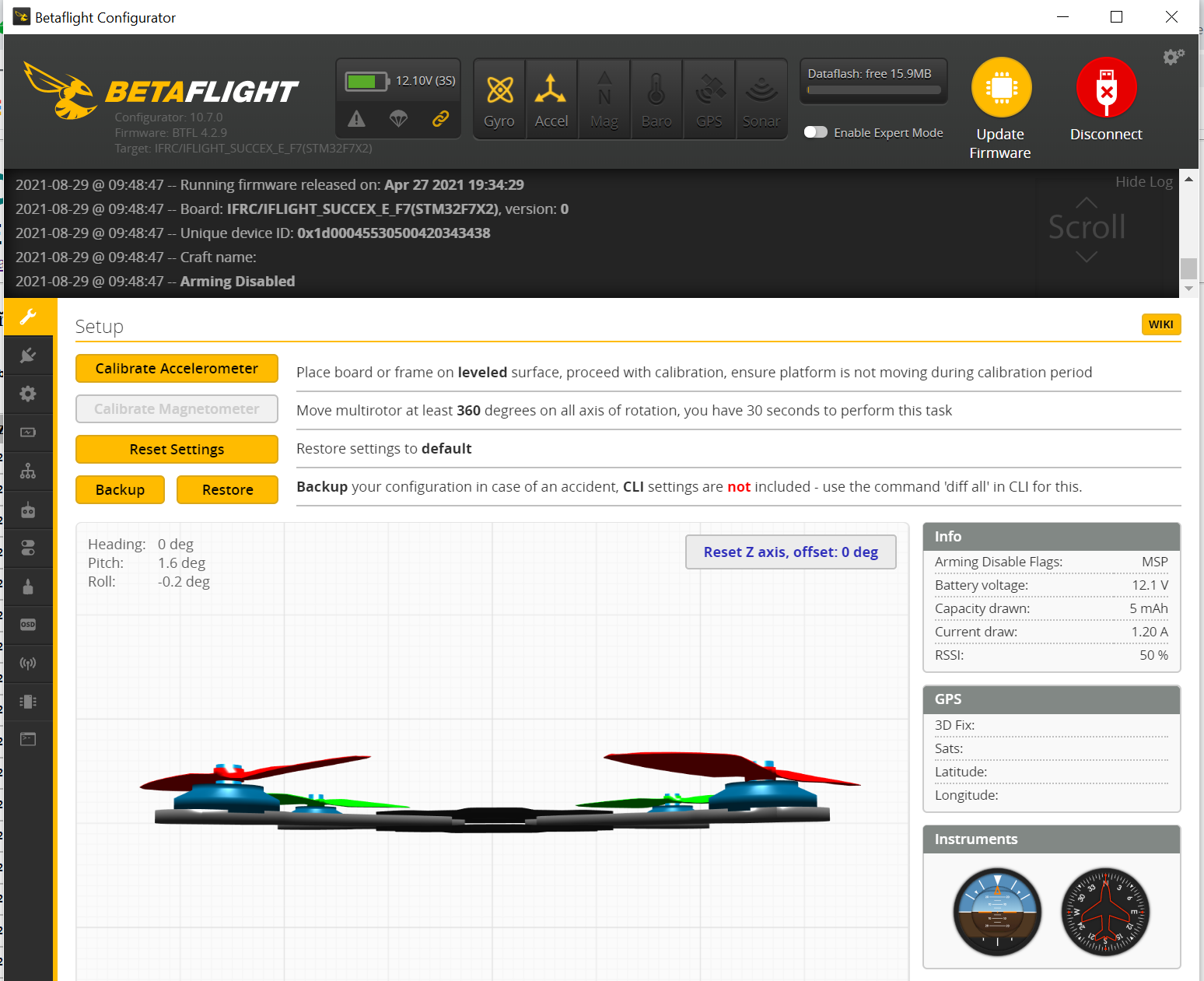
Setup
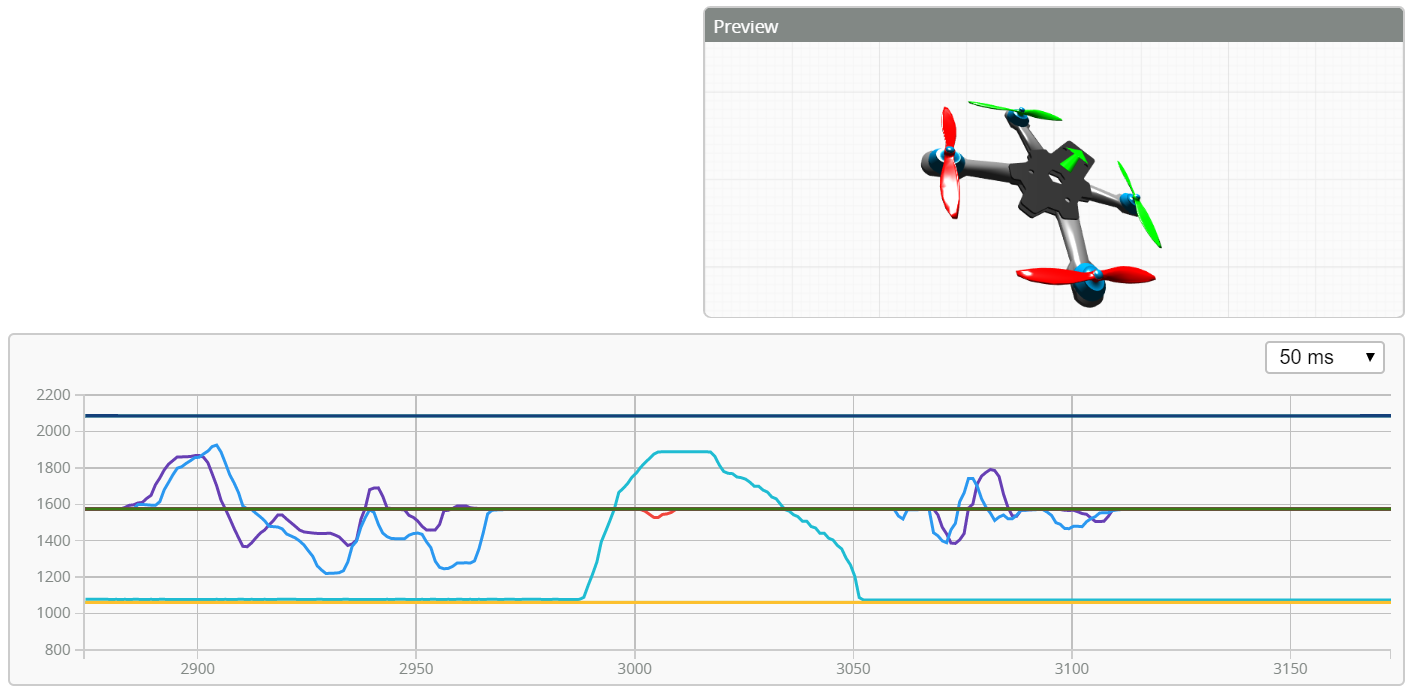
Kalibraci už jsem dělal, jen si ověřuji, že se koptera na obrázku pohybuje stejně, jako otáčím s tou skutečnou na stole.
Ports
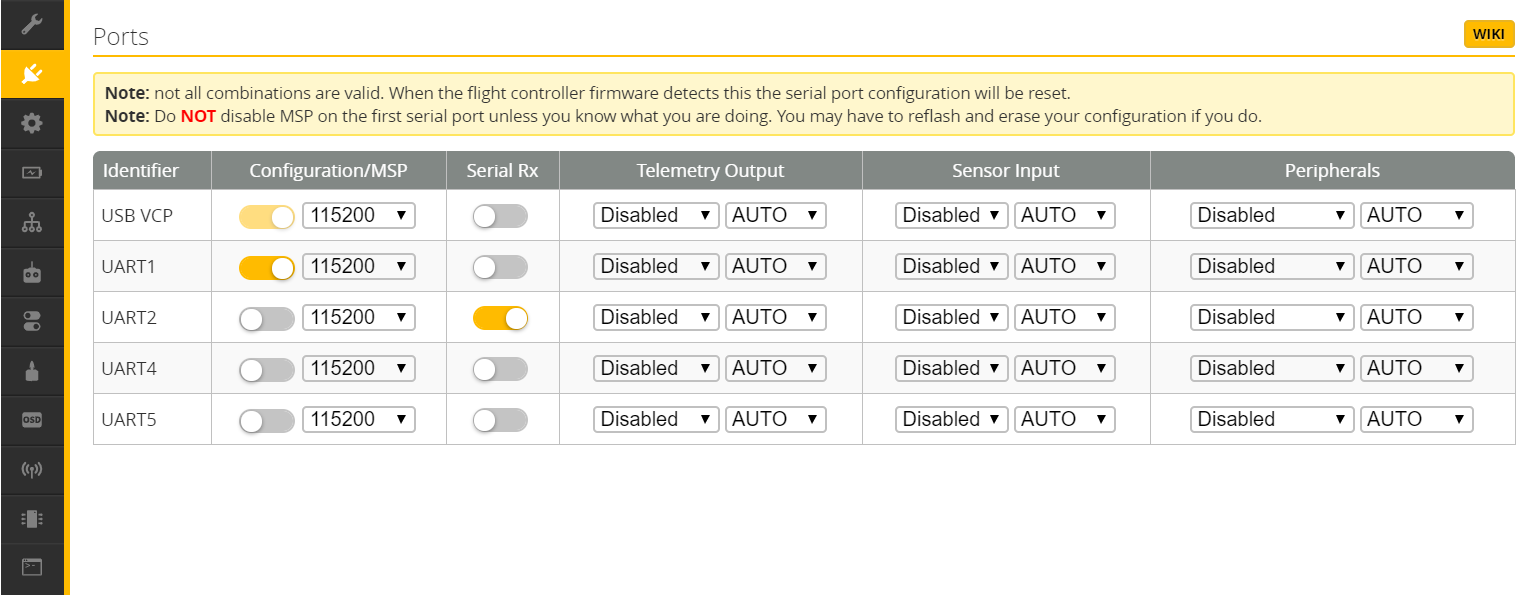
Přes UART1 jede komunikace s DJI FPV,
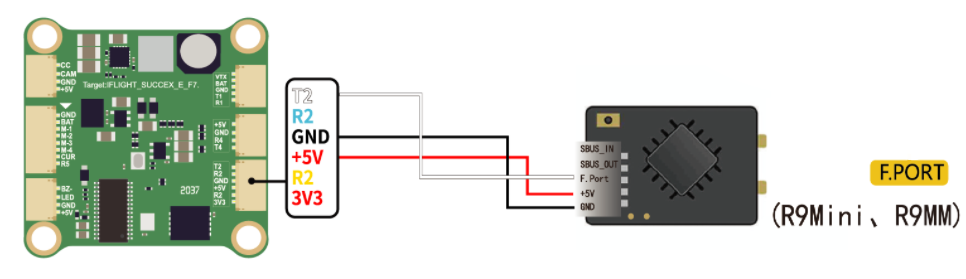
Přes UART2 jde komunikace s přijímačem FrSky R9mini via F.port.
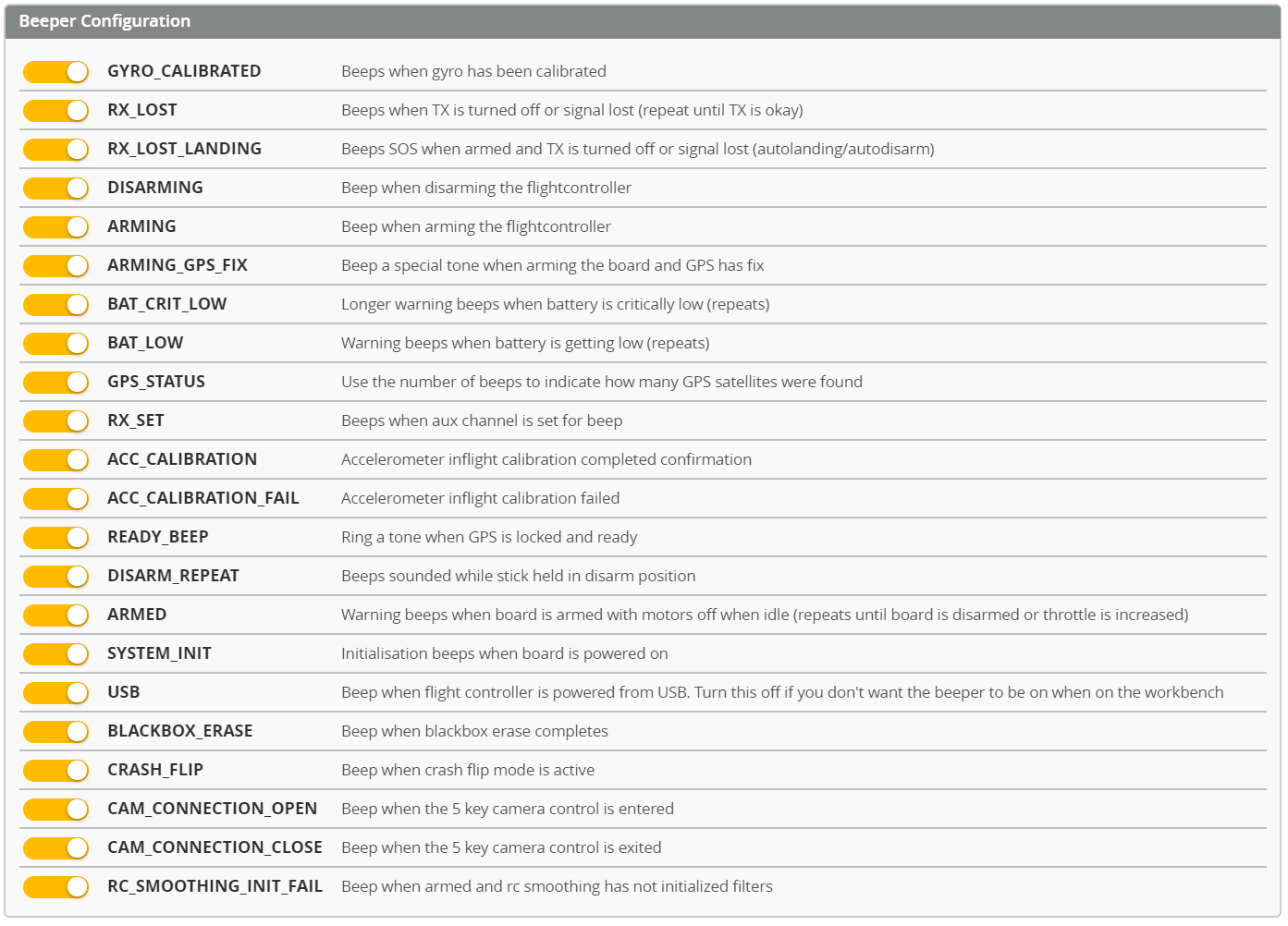
Configuration
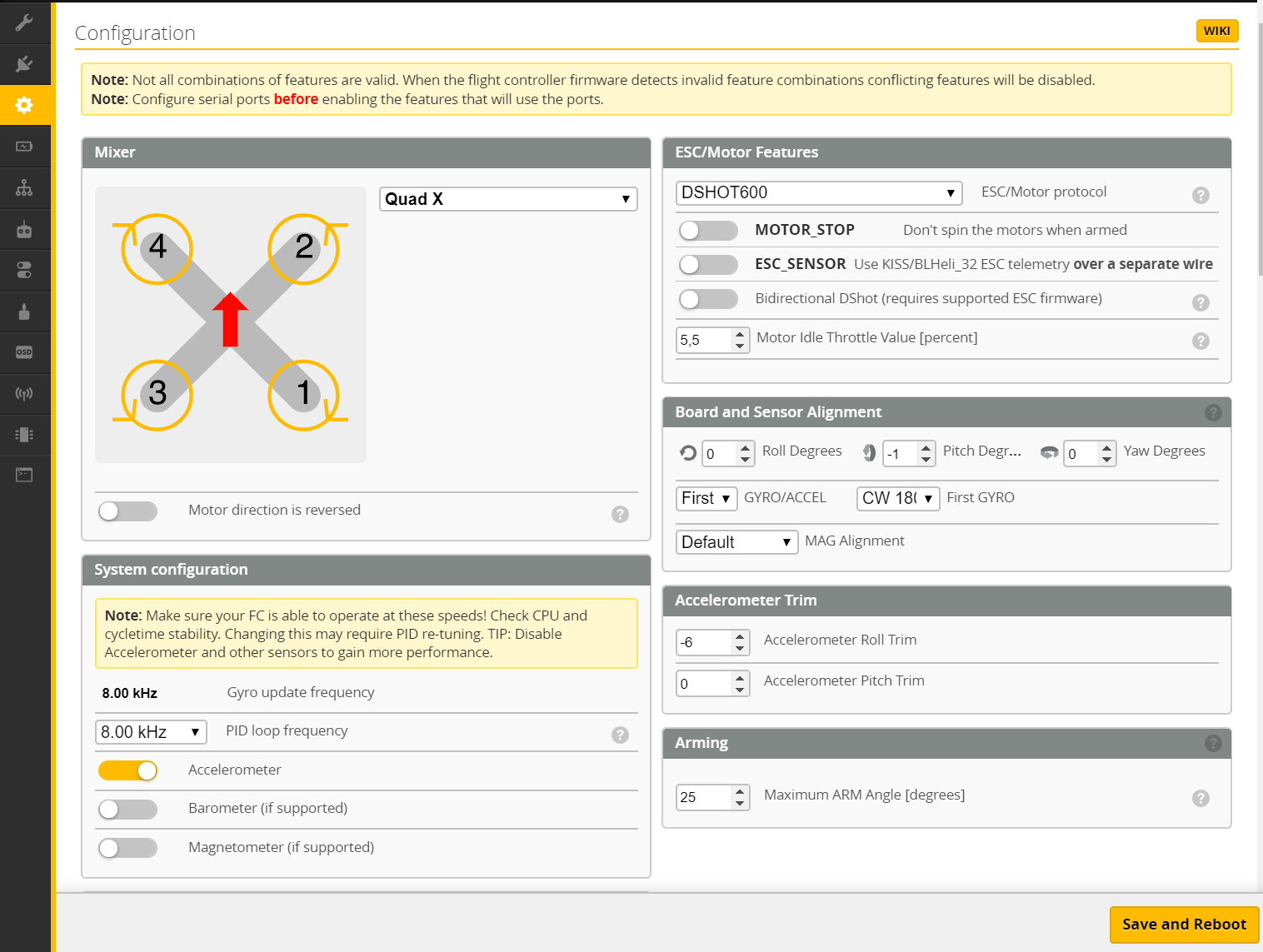
Regulátory podporují DSHOT600.
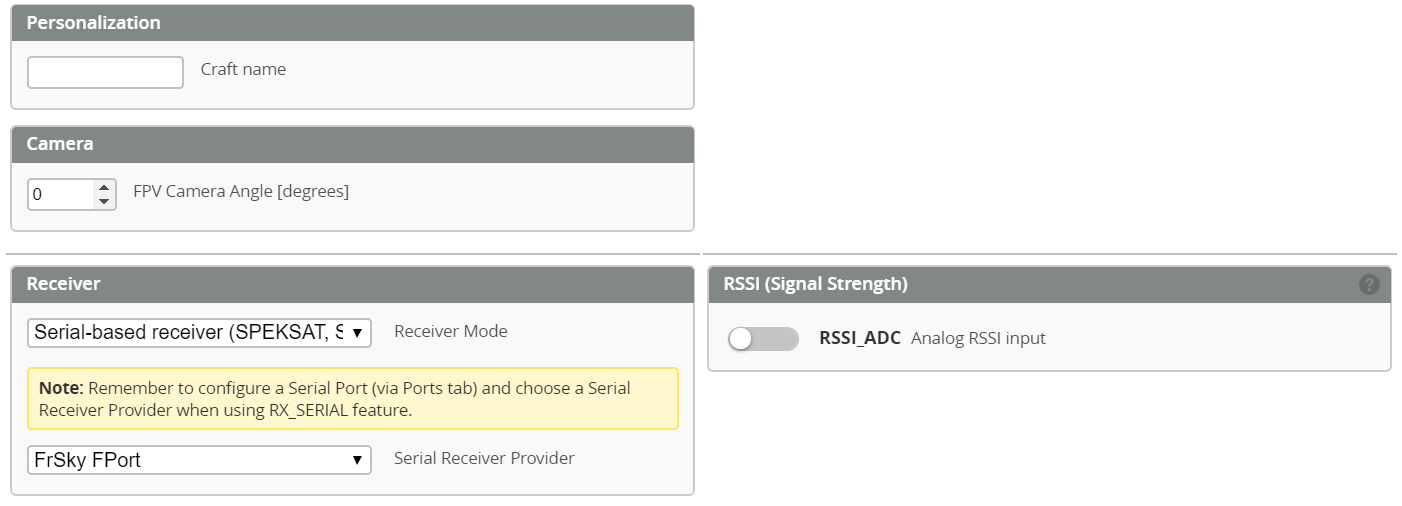
Přijímač FrSky komunikuje přes F.port.
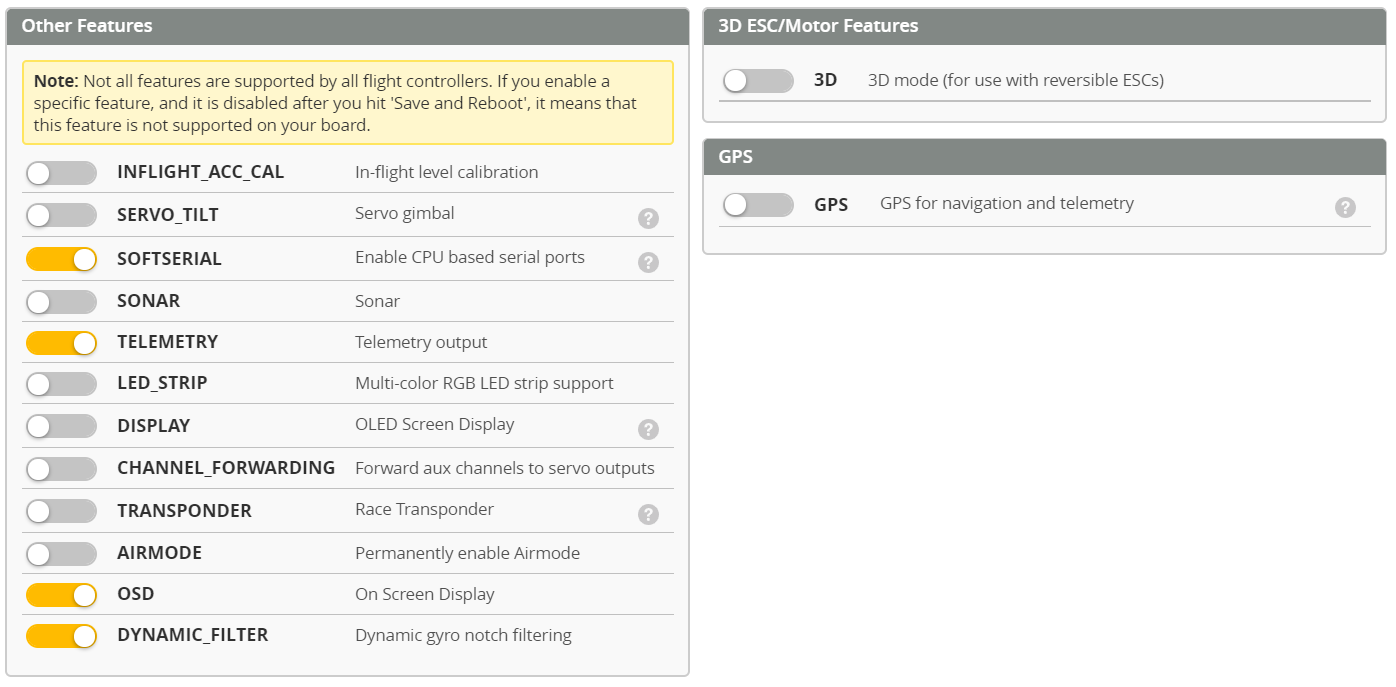
FC posílá telemetrii. OSD jsem zapínal, až když jsem namontoval do koptery DJI FPV

Pípání motory, když koptera přijde o signál vysílače, nebo když se přepne přepínač na vysílači.
Power & Battery
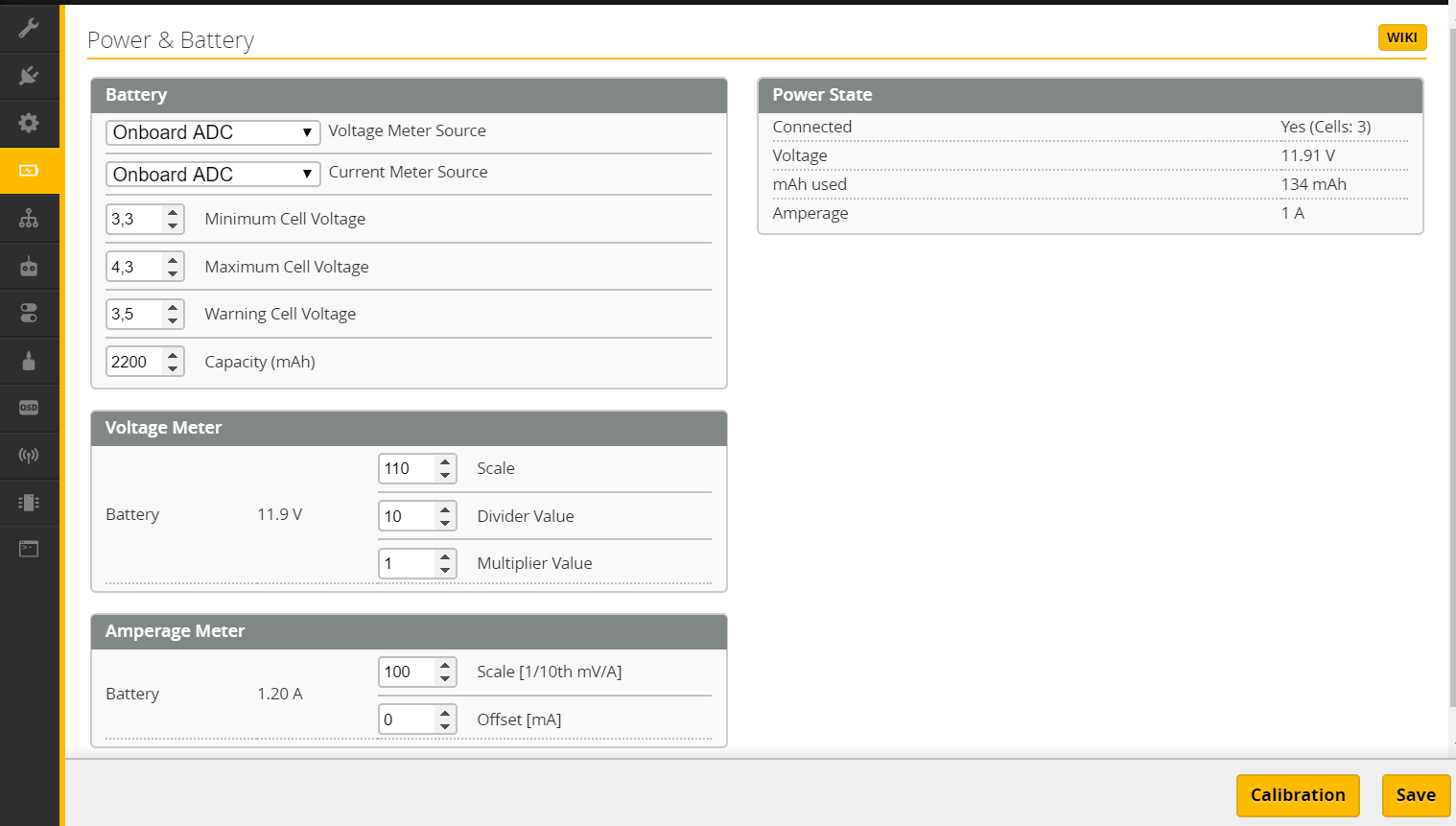
Kapacita mého akumulátoru je 1800 mAh, 2200 Capacity stahuji na 1800.
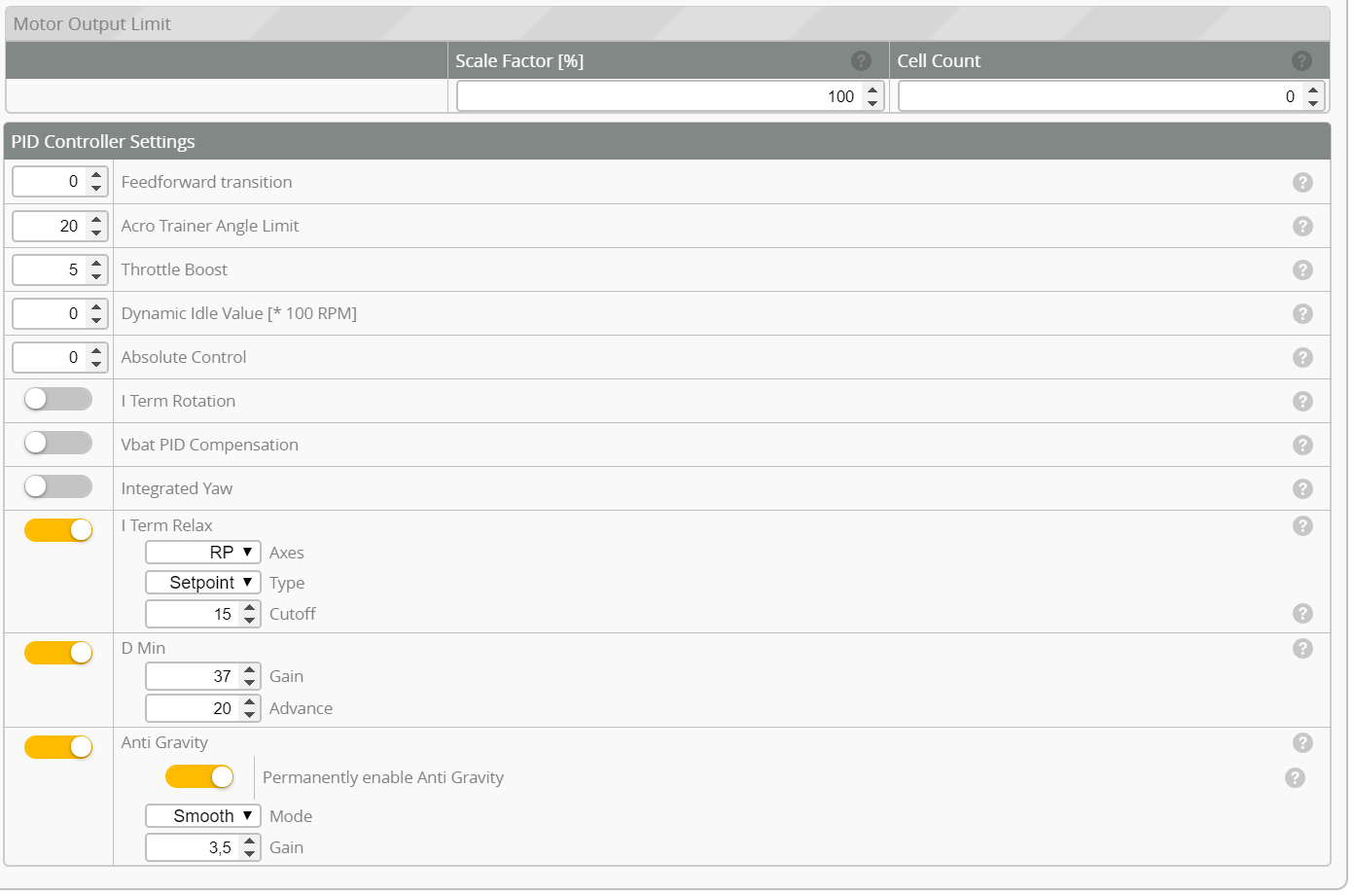
PID Tuning
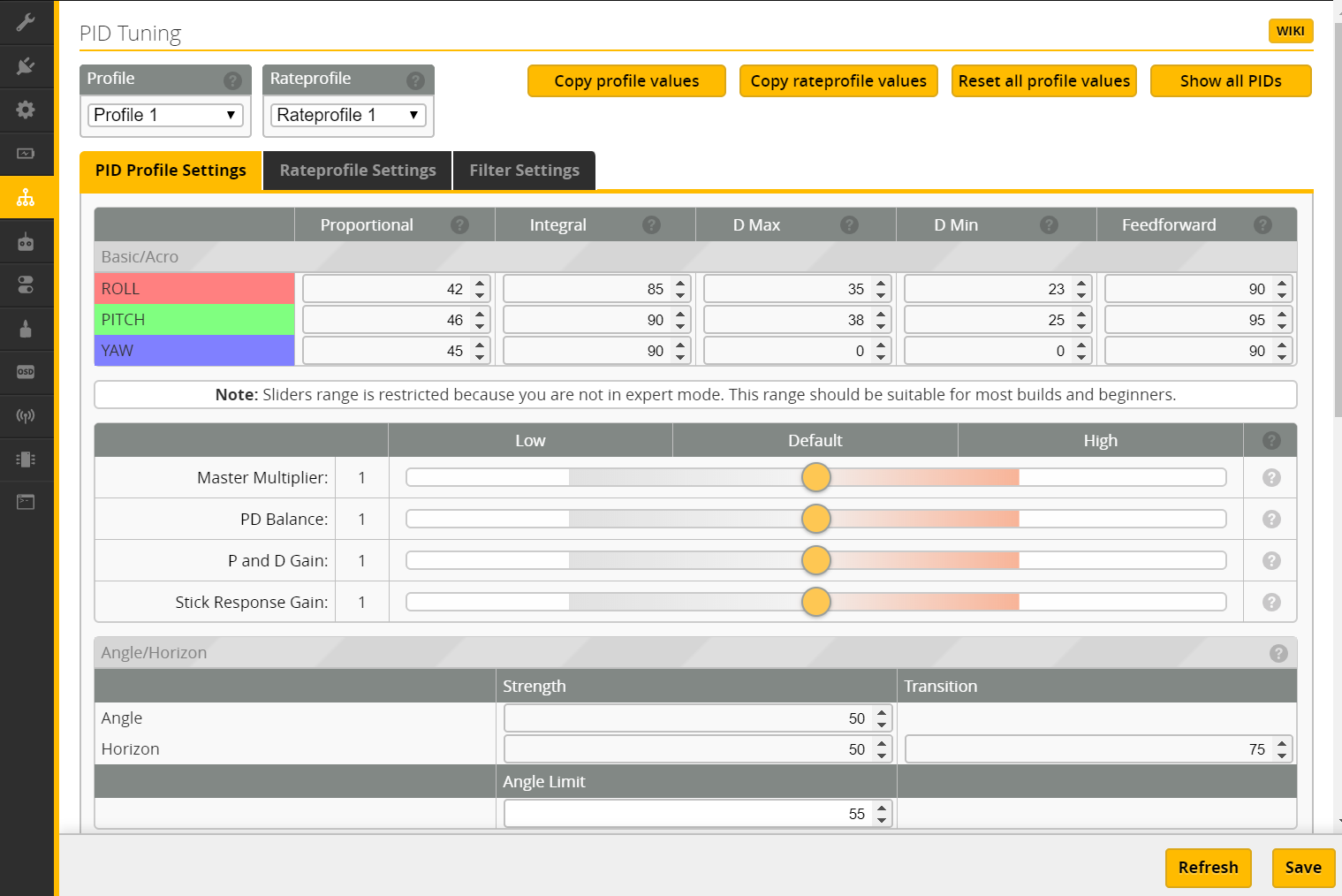
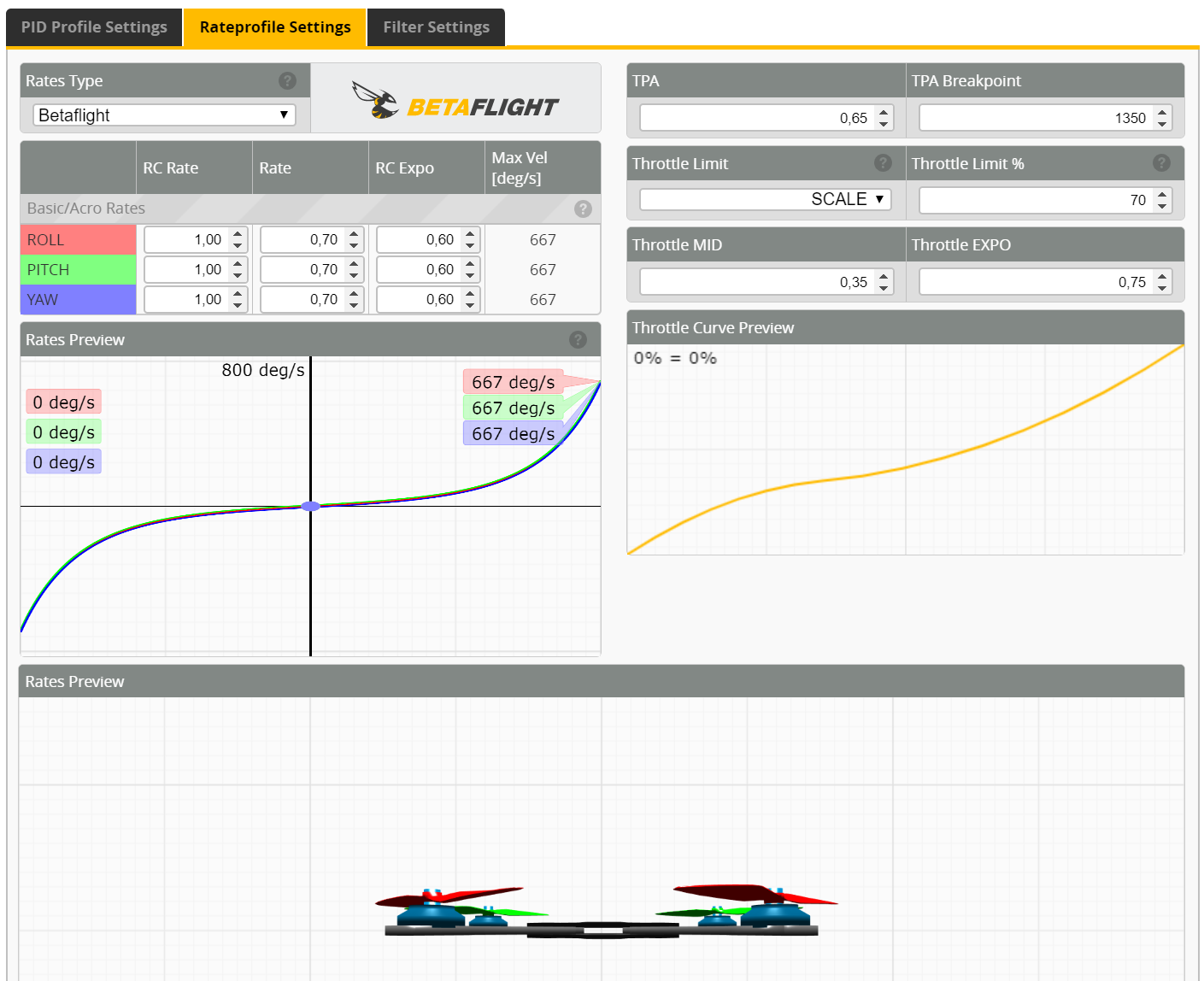
Rateprofile Settings jsem si nastavoval. Throttle Limit jsem si dal na 60%, RC Expo jsem si u všech kanálů nastavil na 0.60, tedy silná expa.
Throttle MID jsem si nastavil na 0.35 a expo 0.75.
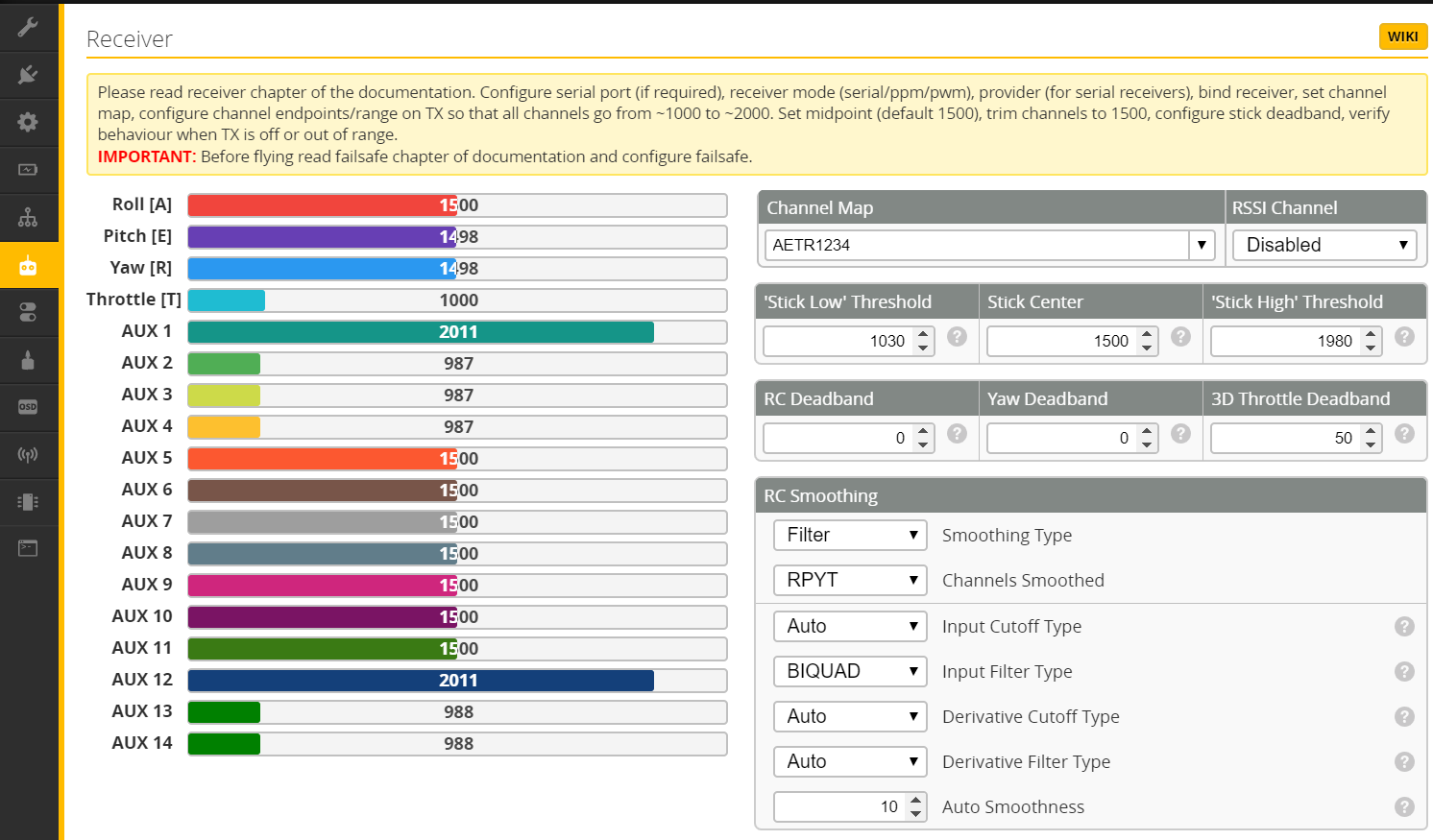
Receiver
Modes

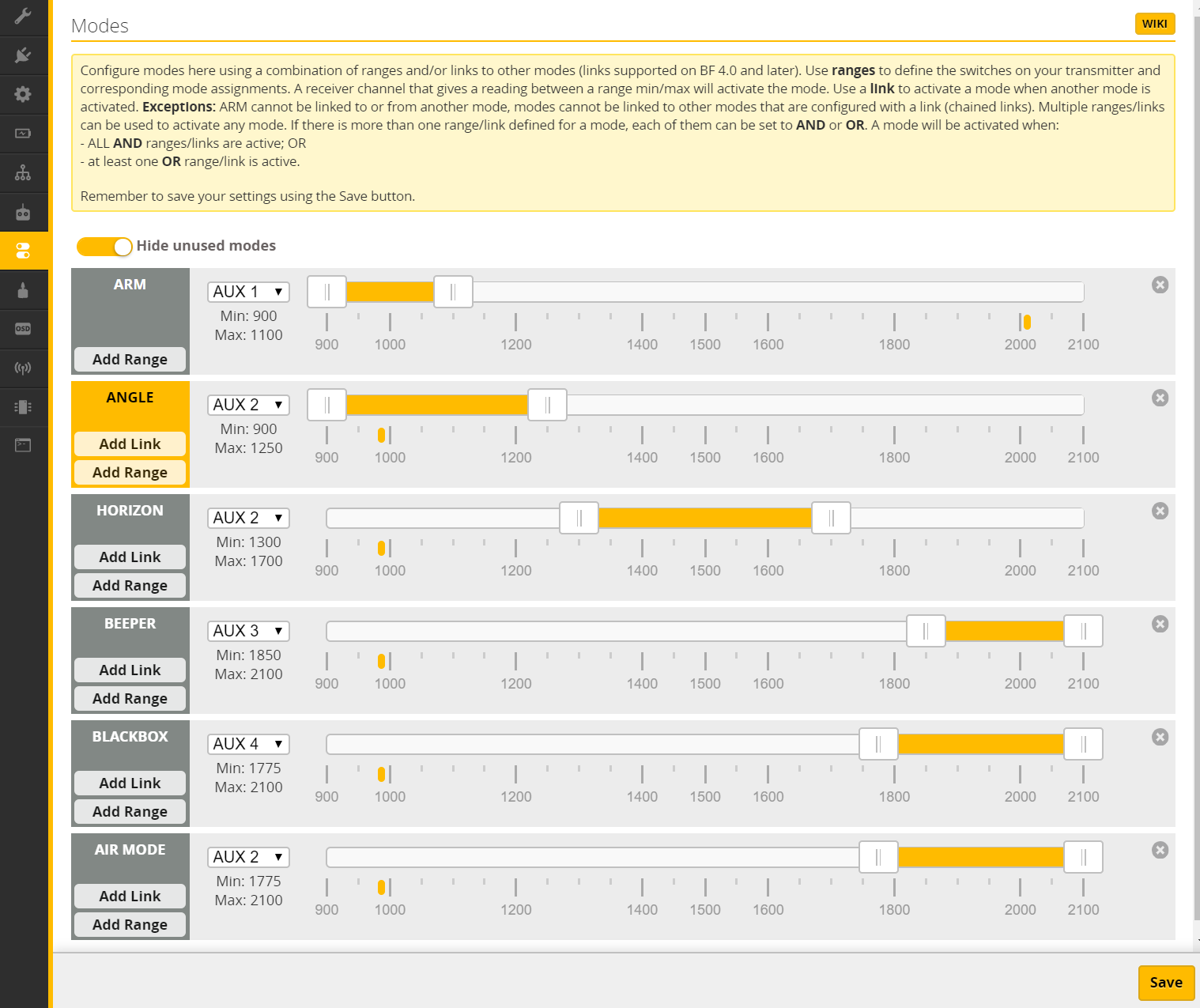
Ve vysílači nastavuji ještě dva kanály - přepínače. Pro ovládání modů.
- Pro armování SF: dolů/od sebe ARM, nahoru/k sobě dis-ARM
- pro přepínání modů SA:
- od sebe - ANGLE
- střed - HORIZON
- k sobě - ACRO
ANGLE a HORIZON jsou "začátečnické" módy. Viz Betaflight módy.
Když to zkouším, motory mi nejdou zaarmovat. Nakonec přijdu na to, že Betaflight nearmuje, když je připojený USB kabelem.
A dalšími přepínači SC a SD ovládám BEEPER a BLACKBOX.
Motors
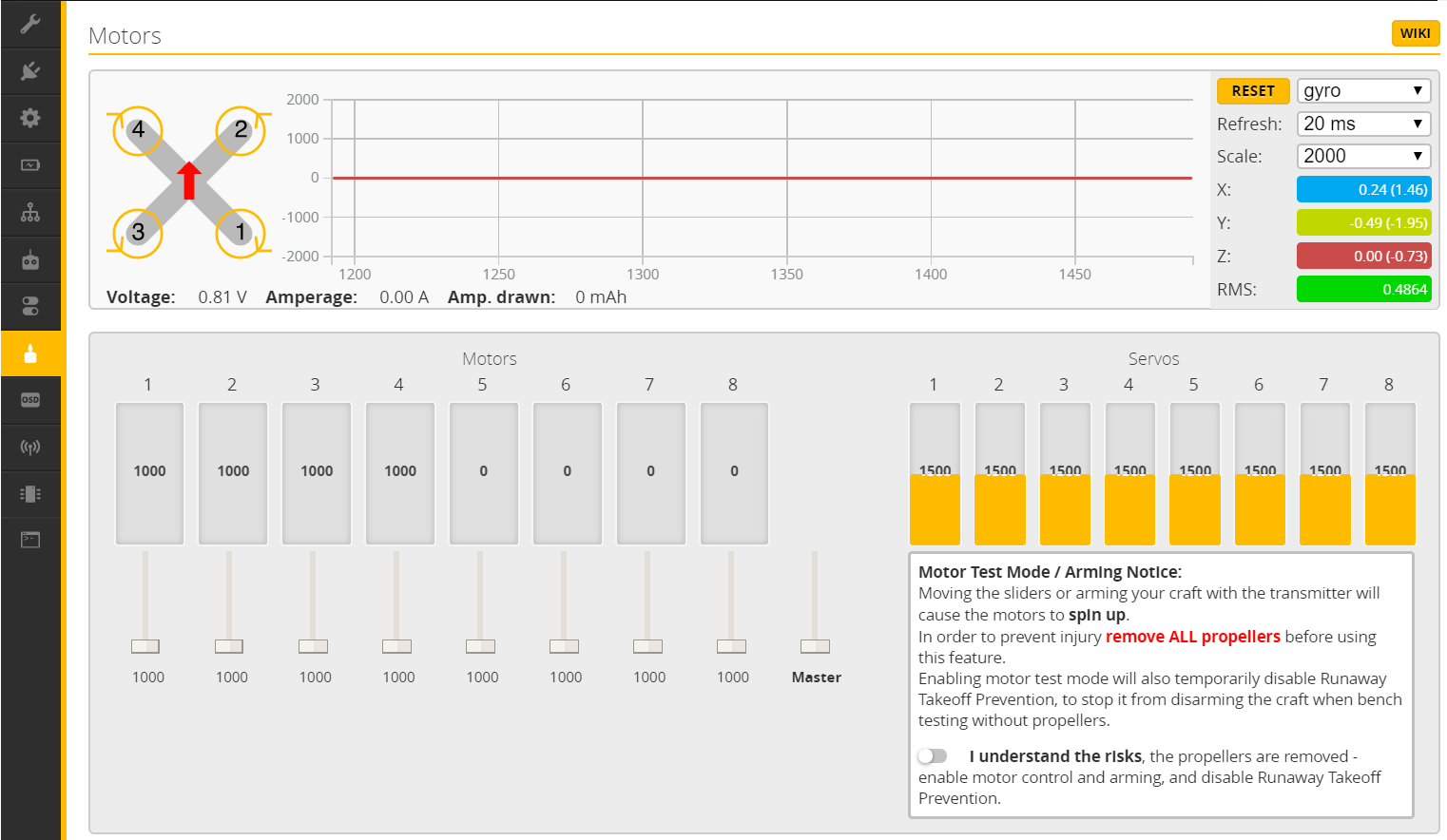
Tady jsem jen testoval motory
OSD
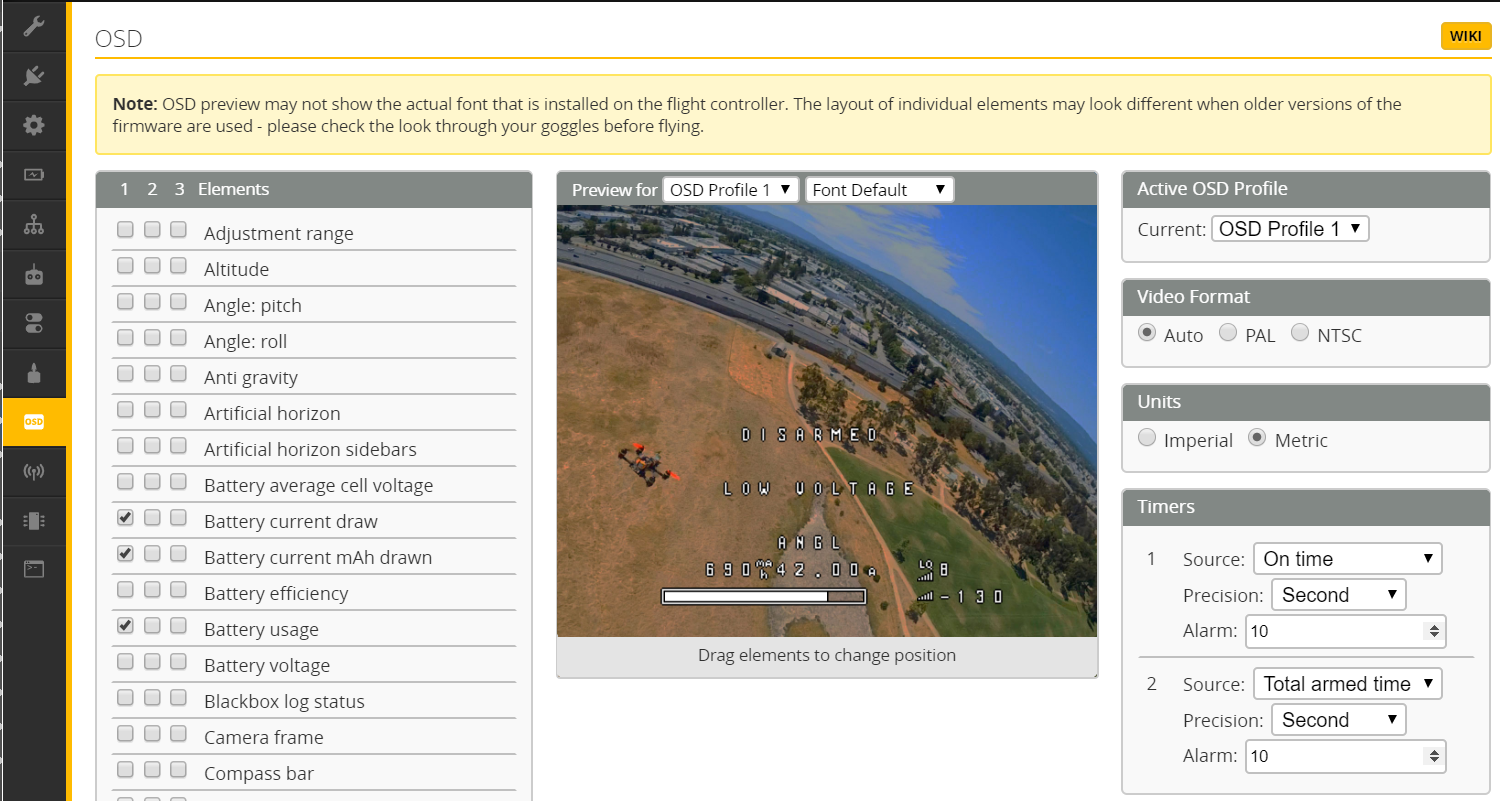
Když jsem připojil DJI FPV, nastavil jsem si zobrazování módů, odběru a odebrané kapacity.
Blackbox
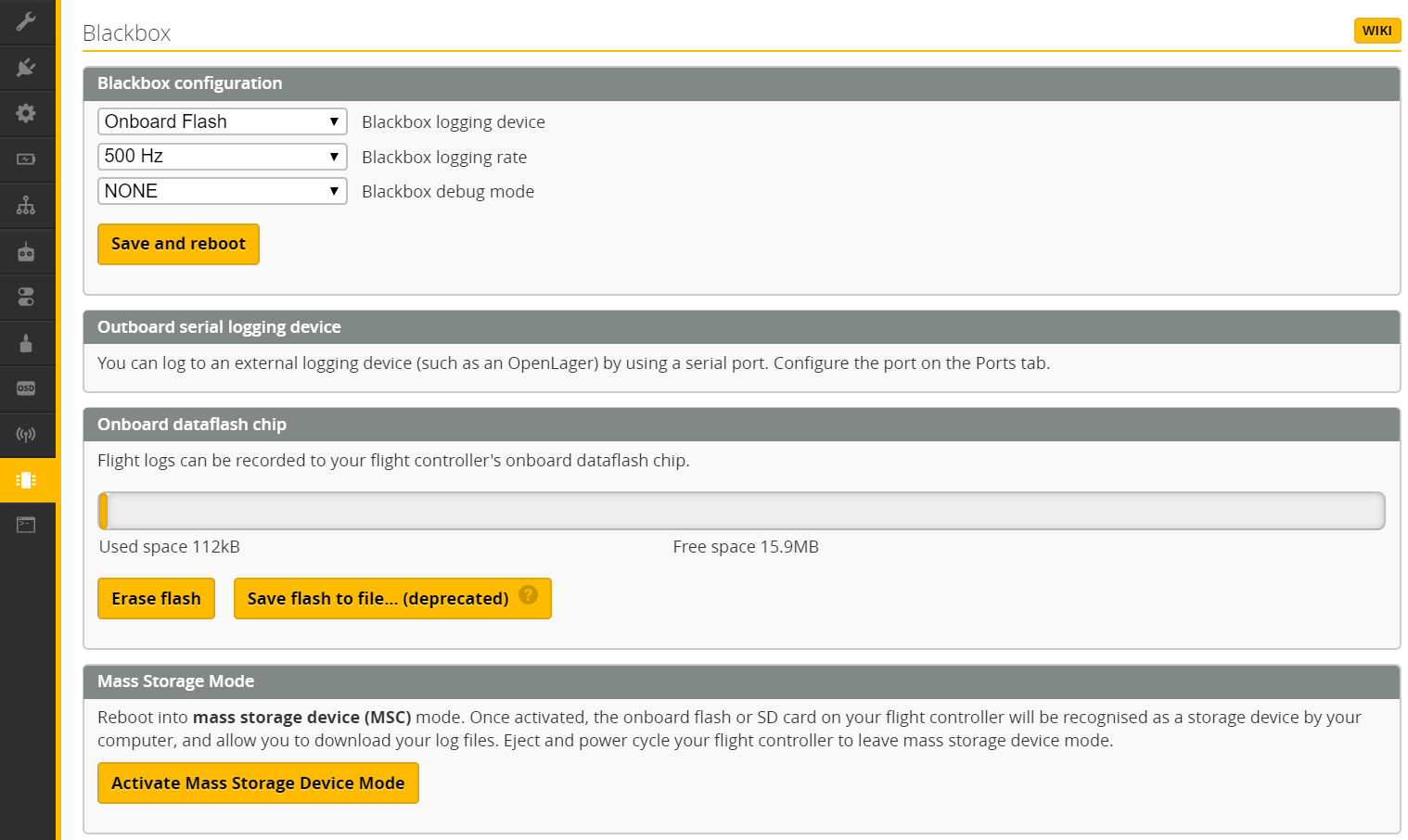
S tím jsem zatím nedělal nic.
Shrnutí
Místo obrázky lze nastavení popsat a taky předat výpisem v okně CLI.
# diff # version # Betaflight / STM32F7X2 (S7X2) 4.2.9 Apr 27 2021 / 19:34:29 (e097f4ab7) MSP API: 1.43 # config: manufacturer_id: IFRC, board_name: IFLIGHT_SUCCEX_E_F7, version: c2b8c0d3, date: 2021-06-18T03:42:42Z # start the command batch batch start board_name IFLIGHT_SUCCEX_E_F7 manufacturer_id IFRC # feature feature -OSD feature -AIRMODE feature TELEMETRY # beacon beacon RX_LOST # aux aux 0 0 0 900 1100 0 0 aux 1 1 1 900 1250 0 0 aux 2 2 1 1300 1700 0 0 aux 3 13 2 1850 2100 0 0 aux 4 26 3 1775 2100 0 0 aux 5 28 1 1775 2100 0 0 # rxrange rxrange 3 987 2011 # master set acc_trim_roll = -6 set acc_calibration = 15,5,210,1 set min_check = 1000 set max_check = 2000 set serialrx_provider = FPORT set serialrx_inverted = ON set serialrx_halfduplex = ON set blackbox_p_ratio = 16 set align_board_pitch = -1 set bat_capacity = 2200 set deadband = 5 set yaw_deadband = 15 set gyro_1_align_yaw = 1800 profile 2 rateprofile 0 # rateprofile 0 set thr_mid = 35 set thr_expo = 75 set roll_expo = 60 set pitch_expo = 60 set yaw_expo = 60 set throttle_limit_type = SCALE set throttle_limit_percent = 60 # end the command batch batch end