
Sestavení a oživení 
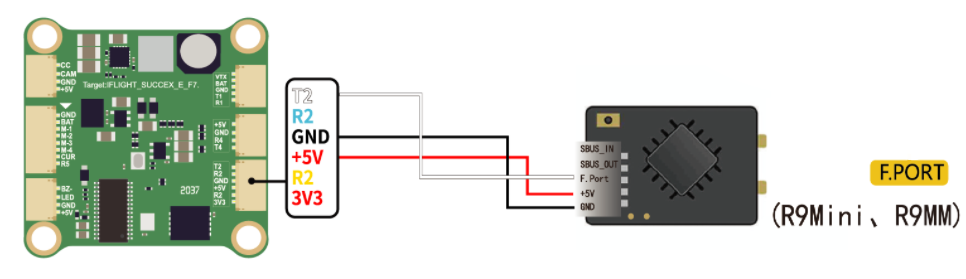
Schema zapojení FC - wiring diagram je zde: iflight-rc.com
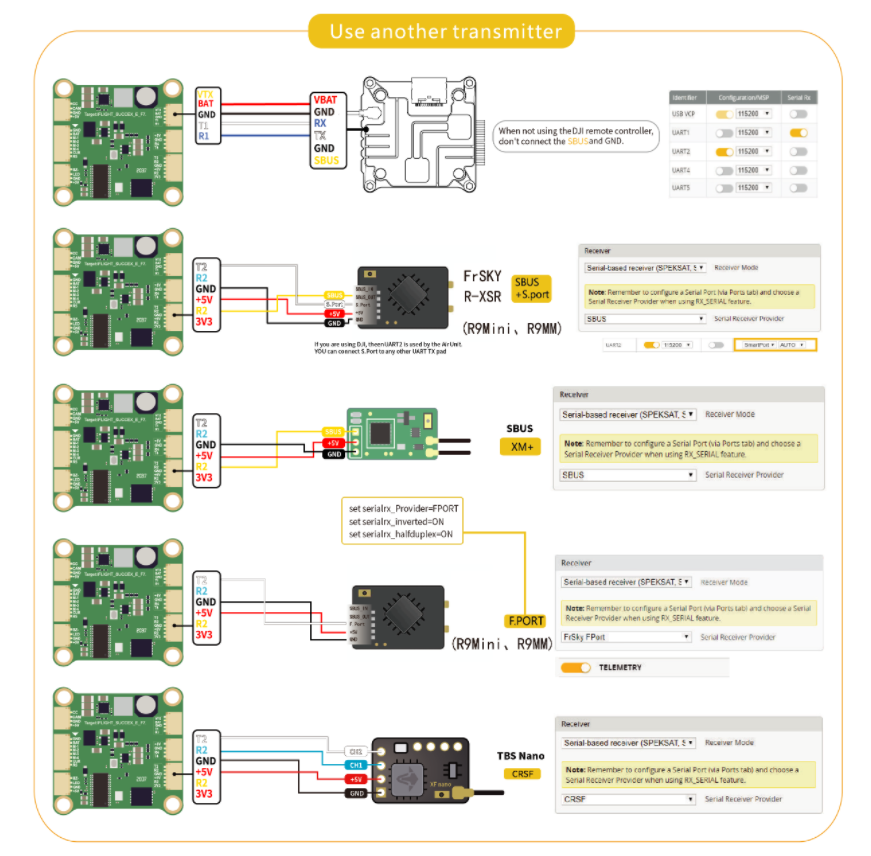
Připojovat budu přijímač R9mini jedním drátem F.PORT.
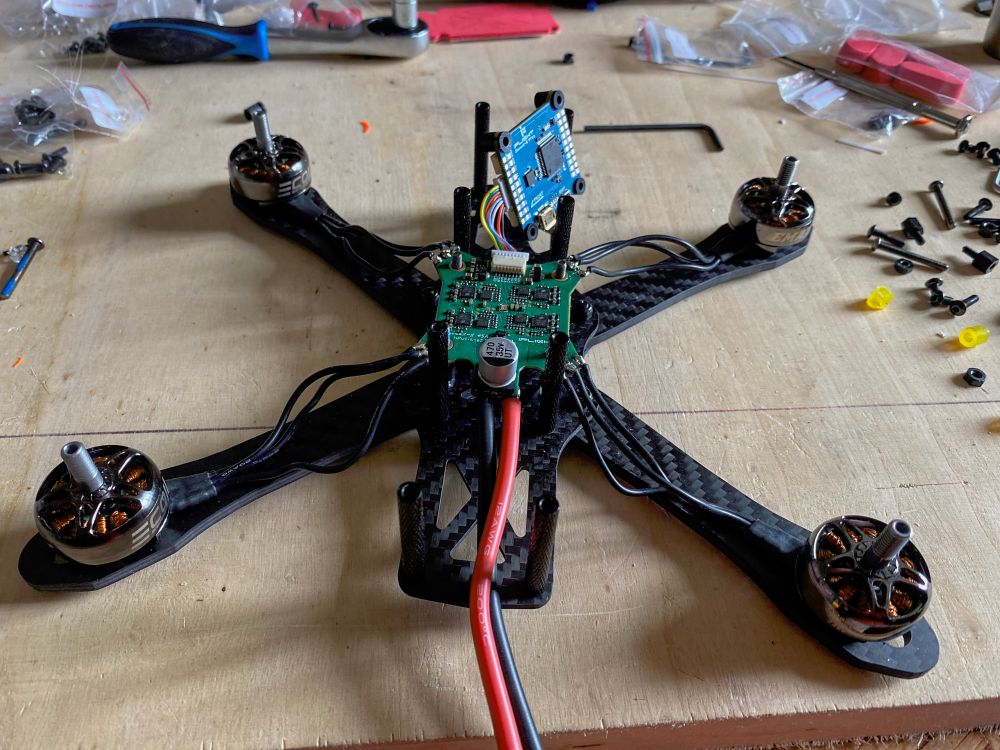
Sestavit rám je jednoduché.

Připájet přívody k motorům už chce trochu pájecí praxi.
Připájet tlustý kabel k baterkám na velké plošky desky,
to chce větší páječku s hmotnějším hrotem, mikropájkou to jde blbě. (viz Postupy při pájení)
Desku s regulátory jsem měl při pájení v rámu omylem vzhůru nohama.
Motory jsem musel od rámu odšroubovat, celé to otočit vzhůru nohama. 
Připojil jsem baterku, motory píply, to je OK.
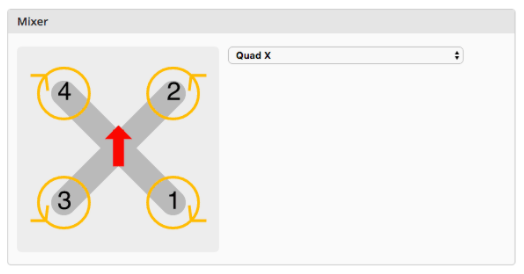
Po připojení FC jsem zkusil směr otáčení motorů. Motory se mi točí všechny jedním směrem! Jde to reverzovat bez přepájení drátů? Ano, lze. Pokud to regulátor podporuje, jde to udělat programem BLHeliSuite. Viz Rotorama . Mě to nešlo, tak jsem směr otáčení motorů udělal přehozením dvou přívodů motorů. U motoru, který se otáčel špatným směrem, jsem odpájel z desky regulátorů dva vodiče, prohodil je a zase připájel. Později jsem se dozvěděl, že v BLHeliSuite mi to nešlo proto, protože jsem neměl připojený napájecí akumulátor, regulátory nebyly pod napětím.
Připojení přijímače byl trochu opruz. Před připojením k FC jsem potřeboval přeflashovat přijímač z ACCESS na ACCST. To se dá udělat přes vysílač. Firmware je tady: www.frsky-rc.com/r9-mini-ota , po stažení a rozbalení vybírám variantu LBT Fport - R9_MINI_LBT_Fport.frk. Jak se přijímač přeflashuje je popsáno třeba tady: oscarliang.com/flash-frsky-rx-firmware . Našel jsem si kapitolu týkající se mého Taranis QX7. Princip je ejdnoduchý. Soubor s firmware se nahraje na SD kartu vysílače, přijímač se připojí k vysílači a program ve vysílači natlačí firmware do přijímače.
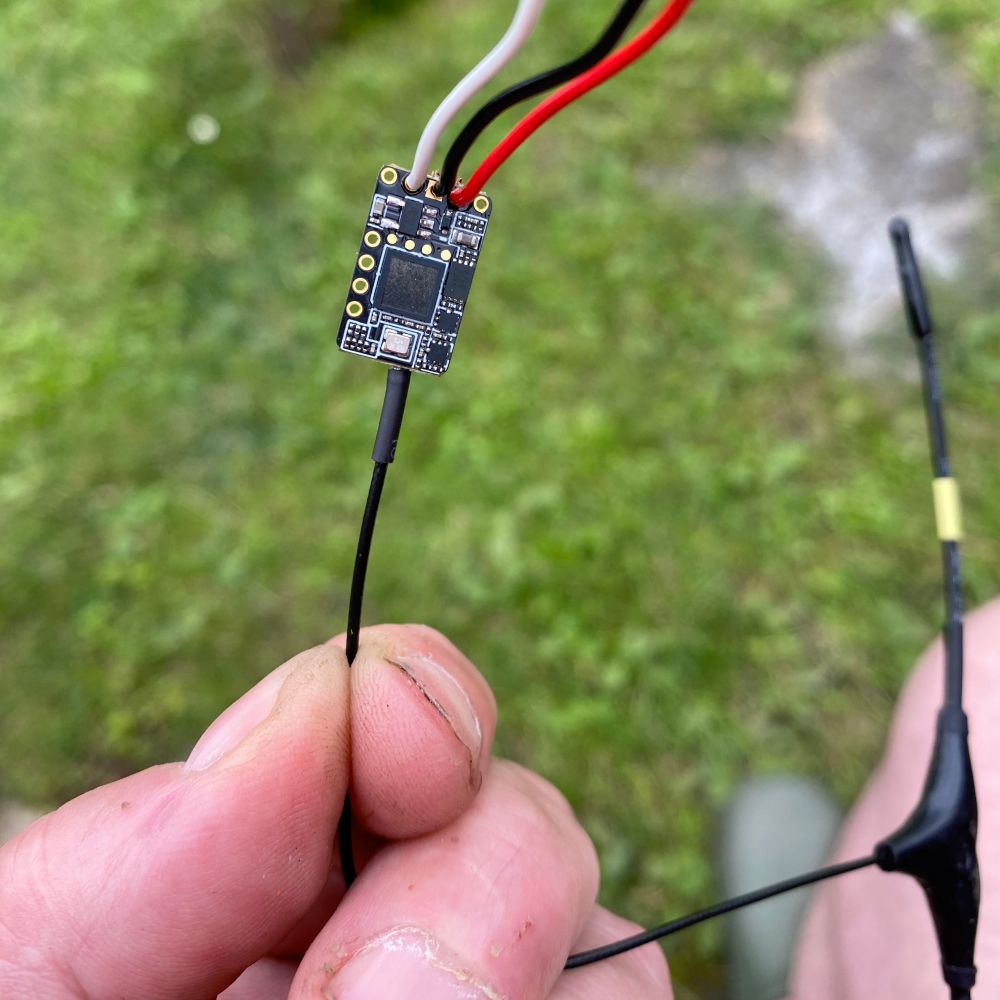
K přijímači jsem připájel tři potřebné vodiče, těmi bude později připojen přijímač k |FC.
Pak jsem si našel kablík, který pasuje do vysílače
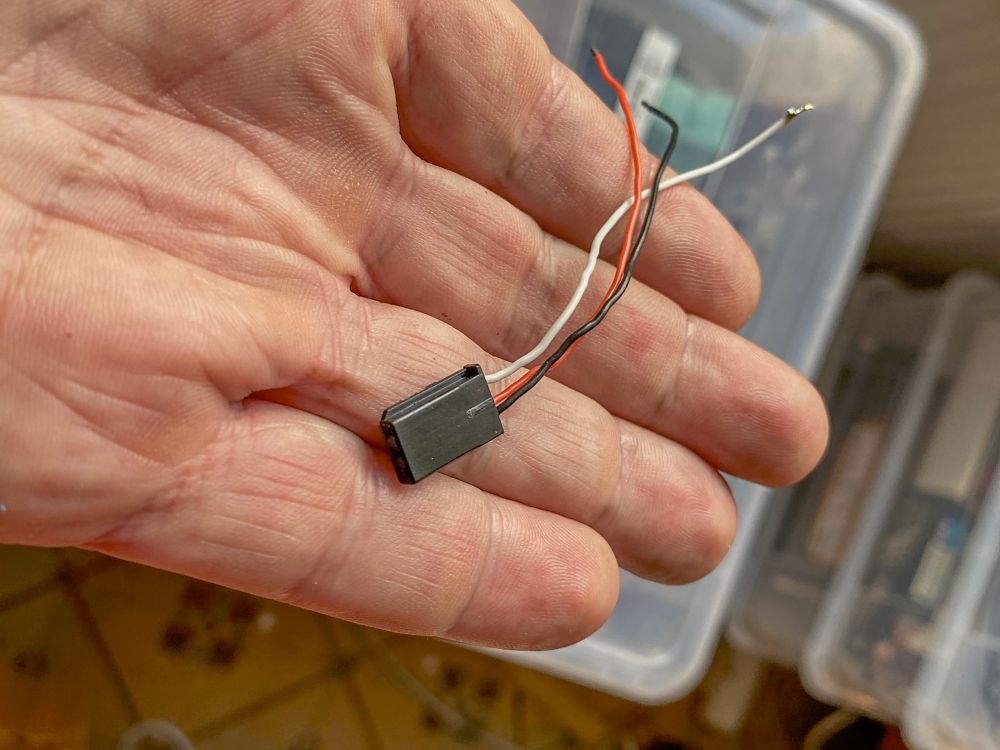
a kablíky pájením propojil. Firmare na kartu v rádiu, přepnout vysílač do modu “Flash external device”, docela dost dlouho to trvá, ale končí to úspěšně. Odpájel jsem kablík s konektorem do vysílače, připájel kablík, který jsem našel v balení flight controlleru. Připojil jsem přijímač k FC na UART2 a spároval přijímač s vysílačem.
Příkazem v konfigurátoru v CLI:
set serialrx_halfduplex = ON
set serialrx_inverted = ON
save
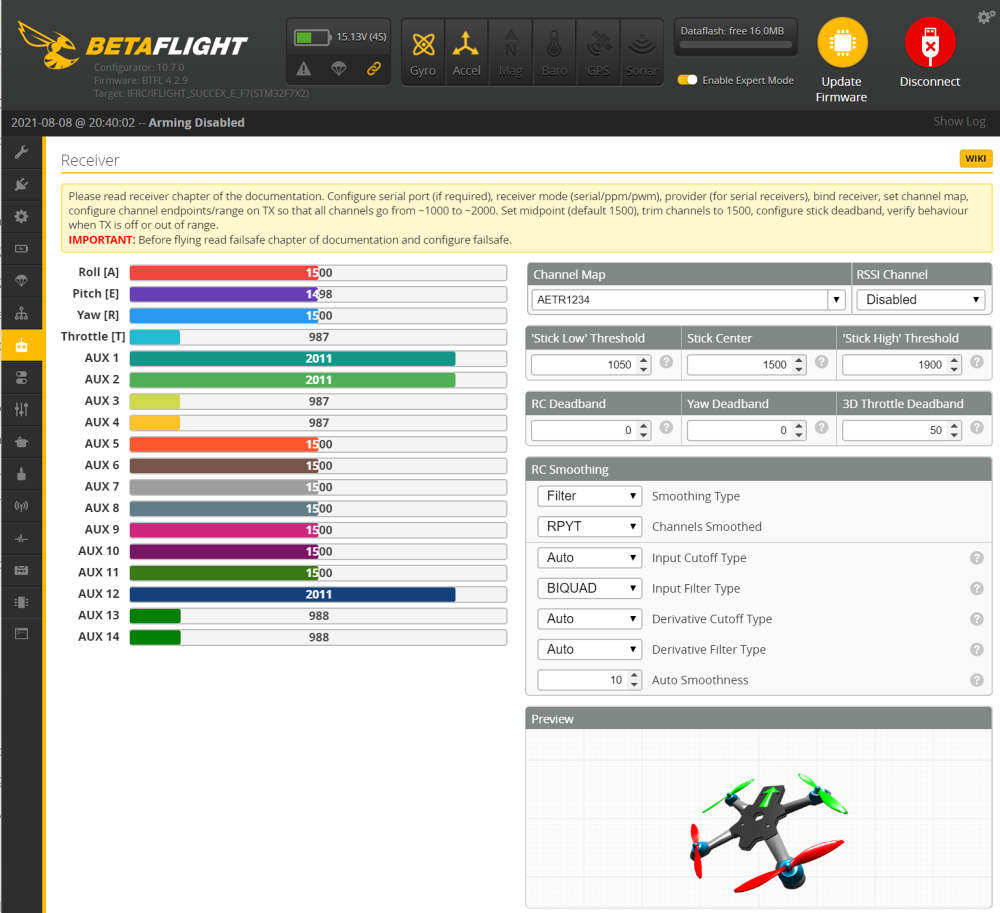
ožívá komunikace vysílače s FC, kanály v konfigurátoru se začaly hýbat.
Pro kopteru jsem si založil ve vysílači nový a úplně jednoduchý model. Jen čtyři kanály knipl - servo bez jakéhokoli mixování, bez exponenciál a podobně. Bez průvodce.
Když montuji desku regulátorů a nad ní flight controller, nevychází mi sloupky a distanční vložky dodané s rámem. To přišlo na řadu "vybavení modelářské dílny", v tomto případě krabice s hadičkami k "benzíňáku", ze kterých jsem si nařezal distanční kroužky potřebné výšky.

Podobně, když jsem nevěděl, jak upevnit přijímač. Radim mi poradil dát přijímač do smršťovačky a oboustranou lepící páskou přilepit na rám. Tak přišly na řadu zásoby smršťovačky. Ty jsem využil i při propojování kablíků. Z dílenských zásob jsem použil:
- tenké kablíky
- smršťovací bužírku - přijímač, ochrana pájených sppojů kablíků
- elektrikářské vázací pásky - uchycení kablíků motorů na ramenech a uchycení antény přijímače (Stahovací pásky)